
| Hardware components: | ||||||
 |
|
× | 4 | |||
 |
|
× | 1 |
|
× | 1 |
|
× | 1 | ||||
|
× | 1 | ||||
|
× | 1 |
| Software apps and online services: | ||||||
 |
|
|||||
|
||||||
 |
|
|||||
Story 
Introduction
In this project, I developed an easily implementable and economic control system for the management of electric drivings. This system shall apply to an pre-existing robot endowed with three axes. In addition, for this robot I have added an axis and designed a flexible gripper that is adaptable to a different workpiece’s shapes.
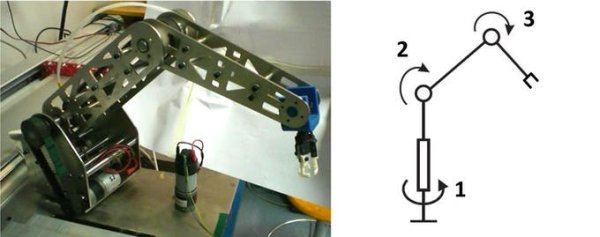
Mechanics
The robot has three rotational joints which are driven by DC motor (E192).
For the end-effector i designed a gripper that is able to pick up objects with different shapes and dimension, made by a flexible fingers.
The gripper is made with polymeric material (PLA) using the 3D printing (FDM).
The gripper is moved by two motors: a servomotor (MG996R) for the rotation on the vertical plane (pitch) and a brushless motor (FIT0441) for the opening/closing of the gripper.
Hardware
The hardware is studied in order to have a modular and economic system.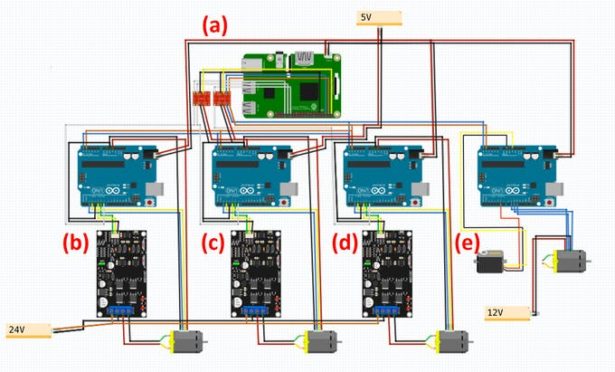 For more detail: End-Effector and Control Logic for Robot
For more detail: End-Effector and Control Logic for Robot