
With this project I can use dataplicity (dataplicity.com) and a Raspberry Pi to control the speed of a car on a SCALEXTRIC system from the internet.
I had a look around for tips on where to start and found a few people had had a crack at it but that documentation was distributed and not so straightforward to follow, so after I figured it out I pieced it all together in one example below. Just for good measure, I plugged the system into dataplicity and I can now control the speed of my car from the internet!
Prerequisities
What you will need:
- SCALEXTRIC set including car (not DIGITAL)
- Power supply 12-14VDC capable of 1-2A.
- Spare SCALEXTRIC controller (likely will be sacrificed)
- Raspberry Pi Model B, or Model A with WiFi
- dataplicity account to connect network devices (dataplicity.com)
- Gertboard (we use only the motor controller output via Raspberry Pi PWM output)
I don't have a SCALEXTRIC digital set so I've no way to know if this project will work with one. Accordingly I suggest you do so only if you know what you are doing.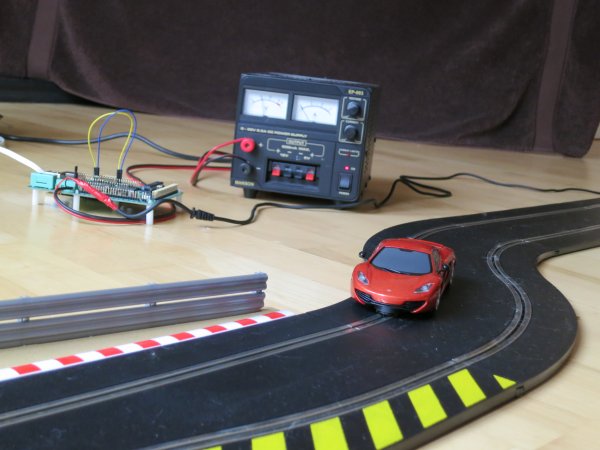
Wiring
You do not need the SCALEXTRIC power supply for this project, so just disconnect it for now. We will be connecting our own power supply.
Disassemble the SCALEXTRIC controller (there are three screws needed to open it). There are three coloured wires on the end of the cabling inside the controller: red, black and green. Each wire with have a tiny flat round plug on the end. You will later screw these wires into the Gertboard headers which are too narrow for the flat round plugs on the end so you may as well cut them off now rather than fiddle about trying to save the controller. The green wire will carry current during operation but is not needed, so tape it up with some electrical tape to keep it safe.
Prep the Gertboard, noting the correct orientation. Fit a jumper to the top two pins on J7 (it won't work without this, I tried it). Connect GP18 on J2 to MOTA on J5. Connect GP17 on J2 to MOTB on J5. Connect your 12-14VDC power supply Ground to the ground pin on J19 (marked with an upside down T symbol). Connect the +ve terminal of your 12-14VDC power supply to MOT+ on J19. Connect the black wire of your SCALEXTRIC controller cable to MOTA on J19 and the red wire to MOTB on J19. Connect the other one to the lane (track) where you anticipate running your car. That's the wiring done.
Raspberry Pi setup and packages
I followed the usual dataplicity getting started guide at http://dataplicity.com/get-started/raspberry-pi/ to set up my account, the Pi, and to register a device class generating a sine wave.
You'll need two additional packages installed at this point: python-dev and wiringpi. These are needed to interface with the Gertboard via PWM.
You must first install python-dev or wiringpi will fail to install.
sudo apt-get install python-dev
Then:
pi@raspberrypi ~ $ sudo pip install wiringpi
Downloading/unpacking wiringpi
Running setup.py egg_info for package wiringpi
Installing collected packages: wiringpi
Running setup.py install for wiringpi
building '_wiringpi' extension
gcc -pthread -fno-strict-aliasing -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -fPIC -I/usr/include/python2.7 -c WiringPi/wiringPi/lcd.c -o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/lcd.o
gcc -pthread -fno-strict-aliasing -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -fPIC -I/usr/include/python2.7 -c WiringPi/wiringPi/piHiPri.c -o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/piHiPri.o
gcc -pthread -fno-strict-aliasing -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -fPIC -I/usr/include/python2.7 -c WiringPi/wiringPi/piThread.c -o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/piThread.o
gcc -pthread -fno-strict-aliasing -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -fPIC -I/usr/include/python2.7 -c WiringPi/wiringPi/wiringPiFace.c -o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/wiringPiFace.o
gcc -pthread -fno-strict-aliasing -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -fPIC -I/usr/include/python2.7 -c wiringpi_wrap.c -o build/temp.linux-armv6l-2.7/wiringpi_wrap.o
wiringpi_wrap.c: In function âinit_wiringpiâ:
wiringpi_wrap.c:4456:21: warning: variable âmdâ set but not used [-Wunused-but-set-variable]
gcc -pthread -fno-strict-aliasing -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -fPIC -I/usr/include/python2.7 -c WiringPi/wiringPi/wiringPi.c -o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/wiringPi.o
gcc -pthread -fno-strict-aliasing -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -fPIC -I/usr/include/python2.7 -c WiringPi/wiringPi/wiringSerial.c -o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/wiringSerial.o
gcc -pthread -fno-strict-aliasing -DNDEBUG -g -fwrapv -O2 -Wall -Wstrict-prototypes -fPIC -I/usr/include/python2.7 -c WiringPi/wiringPi/wiringShift.c -o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/wiringShift.o
gcc -pthread -shared -Wl,-O1 -Wl,-Bsymbolic-functions -Wl,-z,relro build/temp.linux-armv6l-2.7/WiringPi/wiringPi/lcd.o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/piHiPri.o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/piThread.o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/wiringPiFace.o build/temp.linux-armv6l-2.7/wiringpi_wrap.o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/wiringPi.o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/wiringSerial.o build/temp.linux-armv6l-2.7/WiringPi/wiringPi/wiringShift.o -o build/lib.linux-armv6l-2.7/_wiringpi.so
Successfully installed wiringpi
Cleaning up...
Next, load the kernel module for the device:
sudo modprobe spi_bcm2708
At this point we should have access to the Pi's PWM output, thus to the Gertboard motor control output and to the SCALEXTRIC track.
Run a test
Christine Smythe of Farnell has conveniently provided a Scalextric controller example for the Gertboard which is perfect to test this out. For convenience, I've included it as test/fsmot-wpv1p0p0.py in this repo.
Make sure you've switched on your 12VDC power supply (note that you definitely do not require the factory supplied Scalextric power supply as you should be supplying power directly to the rails).
Run the fsmot example (must be run as sudo). Set the increment to about 50, and the motor output to about 30-40% (circa 373):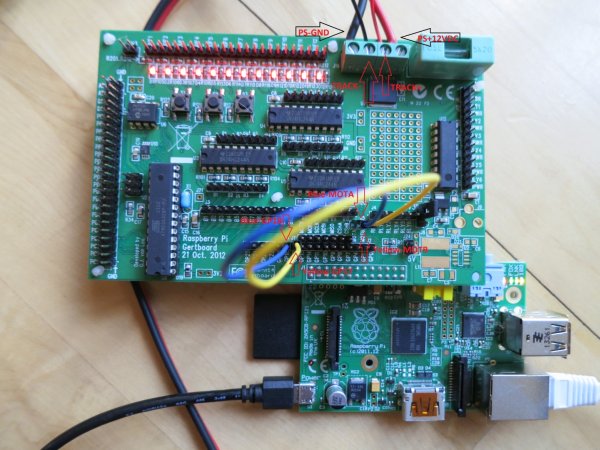
pi@raspberrypi ~/scalextric/test $ sudo python fsmot-wpv1p0p0.py
WELCOME TO THE SCALEXTRIC CONTROLLER
These are the connections for controlling the scalextric motor:
GP17 in J2 --- MOTB (just above GP1)
GP18 in J2 --- MOTA (just above GP4)
+ of external power source --- MOT+ in J19
ground of external power source --- GND (any)
one wire for your motor in MOTA in J19
the other wire for your motor in MOTB in J19
Whilst running, the display bar shows current PWM figure in range 0 to 1023
Press f to go faster, s to go slower, ESC to exit
Choose an increment value in range 1-200 : 50
Hit <RETURN/ENTER> to begin...
0373 #######################
This is usually enough to start the car, so you can try placing the car on the track and see if it starts to move. If it doesn't, try the parallel track (I wasted more time than I care to admit by powering the wrong track).
At this point, we can control the speed of the car from the Pi using the fsmot example.
Now, control it from the internet!
At this point all that remains is for us to adapt the dataplicity sinewave example to directly control the Raspberry Pi PWM output.
We need to create a new device project based on the original sinewave example. Start by making a copy of the sinewave directory:
cp ~/sinewave ~/scalextric
cd ~/scalextric
In that directory you should see a file called ‘dataplicity.conf’ which contains all the information that dataplicity Core needs to run the project. The first thing we need to do is modify the device class name so that dataplicity sees it as a new kind of device.
For more detail: Internet controlled SCALEXTRIC with Raspberry Pi!