
Roboteq launched a Kickstarter project to build an I/O add-in card for robotics navigation that stacks atop a Linux-based Raspberry Pi board. The RIO (Raspberry IO) is based on a 32-bit STM32 microcontroller, and includes a 3A DC/DC converter, several serial interfaces, a CAN interface, 21 GPIO, and an optional module with an accelerometer, gyroscope, and magnetometer for robotics navigation.
Roboteq, which sells motor controllers and other components for mobile robotics devices, intends to offer its RIO as an add-in card to the open source Raspberry Pi single board computer (SBC), as well as a complete embedded Robot Navigation Computer with the Pi pre-integrated. Assuming proper funding on Kickstarter — an initial $15,000 goal by May 25 — the company intends to start shipping to backers on July 15, with volume production by September.
The RIO is primarily intended for mobile robots and unmanned land, air, and sea vehicles, with the help of an optional ARHS (Altitude & Heading Reference System) navigation module that includes a 3-axis accelerometer, 3 axis gyroscope, 3 axis magnetometer, and “a fusion algorithm for precise attitude and heading measure,” says the company. Without the module, however, RIO is a general purpose embedded and robotics controller module, suitable for machine control, industrial and home automation, automotive devices, automated test equipment, and more.
The RIO board is built around an STM32 32-bit ARM Cortex-M microcontroller from ST, which functions as an I/O controller board. The STM32 offloads I/O conversion, capture, filtering, or conditioning processing from the Raspberry Pi Model B’s Linux-based Broadcom ARM11 processor. A second STM32 runs RIO’s optional ARHS board.
A DC-to-DC power converter on the RIO card connects the Pi to any DC source, from 8V to 30V or 40V, depending on final testing. All I/O is handled via a 40-pin MX34 connector and passed on via a 26-pin Raspberry Pi I/O header. The 13 GPIO inputs can be configured as digital inputs or 0-5V analog inputs with 12-bit resolution, or even as digital inputs for pulse width, duty cycle, or frequency capture. Eight digital outputs help to drive loads up to 1A each at up to 24V, says Roboteq.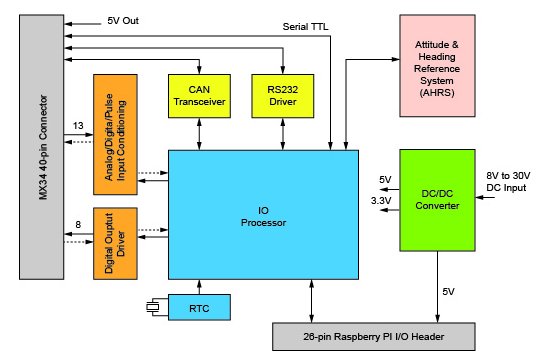
The board offers both an RS232 and an RS485 serial interface, as well as a TTL serial port for connecting to Arduino boards and other microcontrollers, says the company. A CAN bus interface is also provided.
Roboteq provides a set of Linux drivers and a function library for configuring and accessing the STM32 and I/O to enable “seamless exchange data with the Raspberry.” The MCU’s firmware will be regularly updated via the Pi or via a serial interface. According to the RIO FAQ, the “Linux part” — a daemon and I/O function library — “will be totally open source.” Roboteq also plans to open source the RIO card’s SPI mirroring function, and promises to provide example source code for configuring and activating I/O pins.
For more detail: Module turns Raspberry Pi into robot navigation computer