
Summary: In this Instructable we look at how to build more reliable computer systems using WatchDog timers. We show how to set up and use the Raspberry Pi and Arduino internal watchdog timers. We also explain why an external WatchDog Timer is a better choice in many, but not all, systems.
See more on WatchDog Timers in Solar Power applications on www.switchdoc.com.
Step 1 – Introduction to WatchDog Timers
Step 2 – How to Set Up the Raspberry Pi Internal WatchDog Timer
Step 3 – How to Set Up the Arduino Internal WatchDog Timer
Step 4 – Internal Versus External WatchDog Timers / Issues with Internal Timers
Step 5 – Adding an External WatchDog Timer to your Project
Step 6 – Suggestions for Educators and Conclusion
Objectives
In this Instructable you will learn how:
- What are WatchDog Timers and Why they are Cool
- How To use the Raspberry Pi Internal Watchdog Timer
- How to use the Arduino Internal WatchDog Timer
- Compare and Contrast Internal Versus External WatchDog Timers
- How to use an External WatchDog Timer
- Suggestions for Student Experiments with WatchDog Timers
Step 1: Introduction to WatchDog Timers
Introduction to WatchDog Timers
Computers sometimes lose their way. A power glitch, RFI (Radio Frequency Interference), hanging peripherals, or just plain bad programming can cause your small computer to hang causing your application to fail. It happens all the time. How often do you have to reboot your PC? Not very often, but once in while your Mac or PC will freeze making you have to power cycle the computer. Raspberry Pi's will sometimes freeze because of a task not freeing up sockets or consuming other system resources and from power supply fluctuations. Arduinos sometimes freeze because of brownouts on the power line or a short power interruption or because of running out of system resources such as RAM and/or stack space, which is a very limited resource in an Arduino. Sometimes even programmers (gasp!) make mistakes.
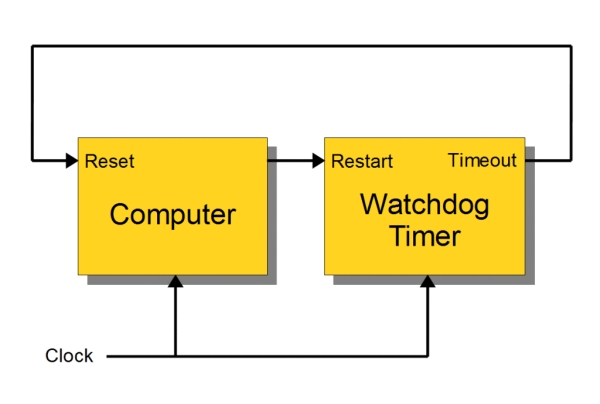
See the WatchDog Timer and Computer Block Diagram above.
In small computers, you can give your device the chance to recover from faults by using what is called a WatchDog Timer (WDT). A WDT is an electronic timer that is used to detect and recover from computer malfunctions. If the computer fails to reset the timer (also called “patting the dog”) on the WDT before the WDT timer expires, the WDT signal is used to initiate either corrective actions or simply to reboot the computer.
Will the use of a WatchDog Timer make your computer project more reliable? The answer is yes. The proper use of a WatchDog timer can make your computer reboot when it gets lost. A known problem with some Python libraries on the Raspberry Pi is that some of those libraries don't properly release sockets and after a long period of time (days generally – not weeks) the Raspberry Pi will hang or thrash because it is out of resources. A properly designed program could detect this and reboot the computer, but a WatchDog Timer can be used to cover a whole multitude of sins with one fell swoop.
In Project Curacao, we use a WatchDog Timer to reset the Battery Power Watchdog in case of a brownout or an RFI upset event.
In our WeatherPi Instructable (http://www.instructables.com/id/Create-Your-Own-Solar-Powered-Raspberry-Pi-Weather/) we use the WatchDog Timer to make sure the Raspberry Pi power is shut off after a “shutdown -h now” halt and also to detect the computer getting lost. More reliablity!
Step 2: How to Set Up the Raspberry Pi Internal WatchDog Timer
Summary: In Step 2 of this Instructable we look at how to set up the Raspberry Pi internal watchdog timer. We also talk about the issues with the Raspberry Pi internal WatchDog and explain why an external WatchDog Timer, such as the SwitchDoc Labs Dual WatchDog Timer is a better choice in many, but not all, systems.
Setting up the Raspberry Pi Internal WatchDog Timer
First of all a definition. Wto is defined as the maximum amount of time the WatchDog timer can count before it needs to be reset (in other words, when it will reboot the computer if the computer goes away. The BCM2835 System on a Chip that powers the Raspberry Pi has a WDT on board. It has 20 bits and counts down every 16us for a Wto of 16 seconds. This means you have to write to the internal WTD earlier than every 16 seconds, or the WDT will fire.
Run the following command to load the internal WatchDog kernel module:
$ sudo modprobe bcm2708_wdog
For Raspbian, to load the module the next time the system boots, add a line to your /etc/modules file with “bcm2708_wdog”. $ echo “bcm2708_wdog” | sudo tee -a /etc/modules
Now run “lsmod” and look for the line in below:
bcm2708_wdog 3537 0
This verifies that the WatchDog module was loaded successfully. Now modify /etc/modules and add bcm2708_wdog
to load the module on boot by running the following command:
sudo echo bcm2708_wdog >> /etc/modules
Then we use the watchdog(8) daemon to pat the dog:
sudo apt-get install watchdog chkconfig
sudo chkconfig watchdog on
sudo /etc/init.d/watchdog start
The watchdog(8) daemon requires some simple configuration on the Raspberry Pi. Modify /etc/watchdog.conf to contain only:
watchdog-device = /dev/watchdog
watchdog-timeout = 14
realtime = yes
priority = 1
To set the interval to pat the dog every four seconds: interval = 4
Finally:
sudo /etc/init.d/watchdog restart
Whew! This sets up the internal Raspberry Pi WatchDog.
Testing the Internal Raspberry Pi WatchDog
To test the Internal WatchDog, set it up as above. Next, edit a file called forkbomb.sh and put the following commands in the file:
#!/bin/bash
swapoff -a :(){ :|:& };:
Execute the forkbomb.sh file:
sudo sh -x forkbomb.sh
Your Raspberry Pi will eventually reboot. A fork bomb works like this: The function is invoked twice and the pipeline is backgrounded; each successive new call on the processes spawns even more calls to “:” (the function). This leads rapidly to an explosive use of system resources, slowing response to a halt and killing the ability of the Raspberry Pi to pat the watchdog timer. If you don't turn the swap drive off then the fork bomb has to fill that also, which makes the bomb much, much slower.
Problems with the Internal Raspberry Pi WatchDog
However, there are a number of problems with the internal WatchDog. The internal WatchDog does NOT power cycle the system. It reboots the Raspberry Pi. This means that it does not restart in all conditions. Especially in low power / brownout conditions often experienced with Solar Powered Systems (see our Solar Power Instructable here).
If the Raspberry Pi takes longer to bootup than 14 seconds (or to whatever value you set Wto), the WatchDog can fire which puts the Raspberry Pi in an infinite bootup sequence. This can happen. I have done it.
If you halt the Raspberry Pi (sudo shutdown -h now), the Raspberry Pi will never reboot. If your program does this by accident, you are finished.
I have found the internal WatchDog to be unreliable. I never could track it down, but it feels like some kind of conflict between user space and kernel space. There are some situations where the Pi will be unresponsive, but the heartbeat may still occur. High load situations for example.
The internal WatchDog is not completely independent of the Raspberry Pi. Theoretically, this should not matter, but the Raspberry Pi running Linux is a complex system.
These are a few of the issues that can be resolved with an external WatchDog. However, it doesn't mean the internal WatchDog is useless, just limited.
Step 3: How to Set Up the Arduino Internal WatchDog Timer
Summary: In Step 3 of this Instructable, we look at how to set up the Arduino internal watchdog timer. We also talk about the issues with the Arduino internal WatchDog Timer and explain why an external WatchDog Timer, is a better choice in many, but not all, systems.
Setting up the Arduino Internal WatchDog Timer
The Arduino is a much simpler machine than a Raspberry Pi. However, it is actually easier to hang an Arduino than it is a Raspberry Pi because all the code is single threaded on the Arduino. Single threaded means that there is only one program running at a time on the Arudino (with the exception of Interrupts, in a manner of thinking). The point is if you only have one thread running at a time, any hang up on that thread will stop the computer. Naturally, there are other problems that can cause your code to crash and Arduino to lock up. Timeouts on peripherals, power issues, RFI, etc., etc. Bad code using the millis() function is a classic problem. You need to handle the rollover at 49.5 days if you aren't using a real time clock.
How to use the Arduino Internal WatchDog (if you can make it work)
First of all a definition. Wto is defined as the maximum amount of time the WatchDog timer can count before it needs to be reset (in other words, when it will reboot the computer if the computer goes away).
There are a lot of things that will keep the internal WatchDog from working in the Arduino, so beware.
Here is a way to work with the internal Arduino WatchDog timer. First of all, the Wto of all the Arduino models is a MAXIMUM of 8 seconds. Keep that in mind. Having a longer Wto covers a lot more sins in my opinion (Wto is 16 seconds on the internal Raspberry Pi WatchDog – which still isn't long enough for our taste), so the Arduino Wto is a bit short. We often have serial processes that run longer than 8 seconds in our designs. Yes, you can incorporate patting into the code, but when you are using external libraries, that is a pain.
To experiment with your Arduino WDT , build a new sketch in the Arudino IDE. WARNING: If you are using an ArduinoMega 2560 or similar device, you may “soft brick” your device. See comments in the problems section below. My Arduino UNO from SainSmart worked fine with this sketch. Start with
#include <avr/wdt.h>
#define RESETWATCHDOG
void setup()
{ Serial.begin(57600);
Serial.println("");
Serial.println ("------->Arduino Rebooted");
Serial.println("");
wdt_enable(WDTO_8S);}void loop(){#ifdef RESETWATCHDOG
wdt_reset();#endif
Serial.println("Arduino Running");
delay(1000);}
Run the sketch and let it run for 30 seconds or so. You should never see the “Arduino Rebooted” message again after reboot. Then, comment out the RESETWATCHDOG statement like this:
// #define RESETWATCHDOG
Now when you run the sketch, if your WatchDog is working, then you should see the Arduino Reboot every 8 seconds or so in the serial monitor.
 Problems with the Internal Arduino WatchDog Timer
Problems with the Internal Arduino WatchDog Timer
Use of the Arduino Internal WatchDogTimer is problematic at best. The Arduino WatchDog Timer has a Wto of 8 seconds so if you are downloading a new sketch and the old sketch has the WatchDog enabled, then you can get into an infinite reboot sequence. This is called “soft bricking”. The Arduino is then pretty much worthless (without a lot of work), but it is still running. WatchDog expires, bootloader starts, bootload works for a while, WatchDog expires, etc., etc. etc. Some boot loaders now disable the WatchDog appropriately, but beware there are a lot of Arduinos out there (like the Mega 2560 – of which we are big fans) that still don't work. You can update the bootloader but it is not an easy job. This is a problem we have run into several times.
- The internal Arduino WatchDog does NOT power cycle the system. It reboots the Arduino via the Reset Line. This means that it does not restart in all conditions. Especially in low power / brownout conditions often experienced with Solar Powered Systems. I have seen this in Project Curacao.
- There are problems with the bootloader (see above)
- The internal WatchDog Timer is not completely independent of the Arduino. If your code jumps to a piece of code disables the WDT, you are finished. Try overwriting your stack to see what interesting things can happen to code in a small embedded system such as the Arduino.
- The maximum Wto is 8 seconds. You can easily be in routines, such as serial communication for more than 8 seconds. Figuring out all of the possibilities and putting wdt_reset() calls in the right spot is difficult and with some serial routines, impossible.
For more detail: Raspberry Pi and Arduino: Building Reliable Systems with WatchDog Timers