There is something about robots that have captured my imagination as long as I can remember. They are my comfort zone whenever I embark on new Maker adventures; as soon as I get past the “blinking LED” project, a basic robot is always my go to project when learning a new platform or technology. And so, when I decided to give Windows IoT Core a try, this project was naturally my starting point. The Rover is a simple robot so it’s a good place to start but it’s also infinitely expandable.
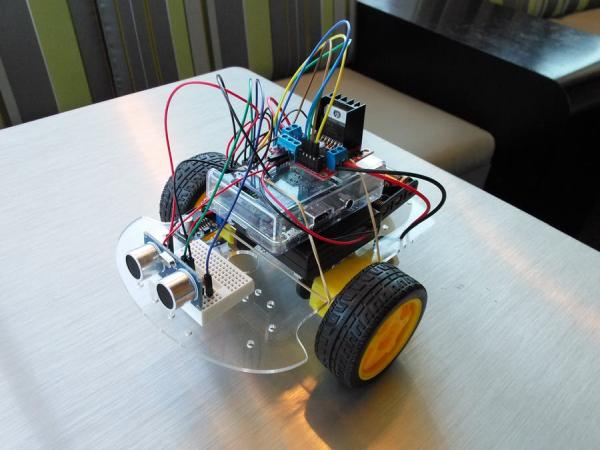
This initial Rover project creates a little robot that runs around your living room on its own. It just drives straight ahead until it detects an object blocking its path. At which point, it turns until it can find a clear path and then its full speed ahead again. The heart of the Rover is a Raspberry Pi running Window 10 IoT Core. The two motors are driven via a dual H-bridge motor controller and an ultrasonic distance sensor is used to detect obstacles. The Rover can be built on any rolling chassis; I selected a low cost one that is readily available from a variety of retailers around the world.
This is a beginner project and no advanced software or hardware skills are required. Excluding the pre-requisites, this project can be completed in 1.5 to 2 hours if you have any Arduino or similar microcontroller experience. If this is your very first electronics project, I recommend that you spend a couple hours watching a few introductory Arduino and Raspberry Pi videos prior to getting started.
I have a few enhancements still to make:
Light dependent resistor and LEDs for headlights.
Code to mimic a PWM signal on the digital GPIO pins to adjust the Rover’s speed.
3D print a body to hide all the electronics (maybe print a chassis as well).
If you try any of these enhancements or any others you come up with, please leave a comment and let me know how it went.
Here are some online resources that I found very helpful throughout the course of this project:
Tools: #1 phillips head screwdriver; soldering iron or electrical tape; optional wire stripper
Parts: robot chassis kit; optional 4 x AA battery holder with on/off switch
There are several robot kits on the market that will work with this project. You just need a kit with two driven wheels and a third for balance. Follow the instructions which came with your robot chassis kit to assemble the base plate, motors, and wheels. I found a YouTube video showing the assembly of a robot kit very similar to the one I used.
I am an experienced technical writer holding a Master's degree in computer science from BZU Multan, Pakistan University. With a background spanning various industries, particularly in home automation and engineering, I have honed my skills in crafting clear and concise content. Proficient in leveraging infographics and diagrams, I strive to simplify complex concepts for readers. My strength lies in thorough research and presenting information in a structured and logical format.
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt out if you wish.ACCEPTCheck Privacy Policy
Manage consent
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.