
1. Introduction
Our nation’s infrastructure is aging and deteriorating rapidly. Currently there is no mechanism to thoroughly inspect the condition of our bridges, waste tanks, pipelines, and reactors. Many of these structures have reached the end of their design life and need to be inspected for deterioration. Like this situation on land, there is also the need to inspect the hulls and decks of US Navy ships and oil tankers for signs of corrosion. Many old structures, such as tall bridges and waste tanks, are often difficult to probe or inspect for a multitude of reasons. The most common reason is that the inspection process is hazardous to humans, or the structure has sections that are inaccessible. Another common reason is that current probe technology may be inadequate to accurately inspect such structures. Thus, manual inspection is infrequent, laborious, expensive, hazardous and error-prone. This problem offers a perfect opportunity for a well-made inspection robot.
Inspection robots are typically designed and developed by large well-funded teams of electrical and mechanical engineers. Commercial robots, such as the Packbot 510 (http://endeavorrobotics.com/products), can cost more than $100,000. Given the constraints of an individual science fair project, the scope here is to design, develop and test an inexpensive prototype for an inspection robot. The aim of this project is to develop a small, lightweight and inexpensive inspection robot prototype that can stay attached to the surfaces to be inspected. The project is made up of the following tasks: review of literature and existing designs; specification of requirements; robot design; development of initial prototype and testing; engineering mechanics calculations; programming the robot using Python; development and testing of the second prototype; and development and testing of the final prototype.
Before physically building the robot, the 3D modeling software SketchUp was used to visualize the robot and refine the design. The robot was built from commercial off-the-shelf components, including a Raspberry Pi 3 module to control the robot. The design was iteratively improved through repeated testing. Python code was written from scratch to program the robot. As the design evolved, both the hardware and software had to be modified in tandem. The prototype was demonstrated to engineering experts at Washington River Protection Solutions and Pacific Northwest National Laboratory, and the Senior Design Class at Washington State
University, Tri Cities. Based on feedback from the experts, engineering mechanics calculations, and the results of testing, the third prototype was built and programmed. The resulting robot is able to climb walls at a reasonable speed and has multiple cameras to help with navigation and inspection. The robot produced by this project represents a unique design with software written specifically for this purpose. This prototype serves as a flexible platform in that new sensors can be added as needed to augment the inspection capabilities.
2. Literature Review
Before beginning work on the project, I performed a literature review to evaluate existing solutions. Currently available probes can be classified into two types – stationary and mobile.
Stationary probes are the most widely used tool for inspecting structures. They provide very detailed information about a particular section of a structure and can continuously monitor it. However, once they are positioned in a location, the range of observation will be limited. Due to the lack of mobility, they are unsuited for monitoring large structures. The other category is made up of robot mounted probes. These offer a greater degree of functionality as the probe can be moved freely. Most robots currently on the market are very specialized in a specific task or kind of inspection. Some robots may specialize in traversing water, high altitudes, or swampy semi-solid terrain, but none of those robots are useful for structural inspection.
The aquatic inspection robot AQUA1 is a great example. AQUA is a highly specialized and expensive inspection robot. It crawls on the bed of water bodies and takes 3-dimensional (3D) scans of its area. It is able to use cameras, sensor scans, and algorithms to follow a designated path underwater. Despite the fact that it is an inspection robot, it is useless for structural inspection, since it lacks the ability to climb on ferrous surfaces.
Another example is the AETOS2 aerial drone. The AETOS drone is a quadcopter that is used for surveying, landscape mapping, and emergency response. The robot itself is a remote piloted quadcopter that suspends a high-power camera. The camera is able to capture and record detailed images and videos of structures and landscapes. The AETOS drone is versatile in its usage and can even inspect exposed structures such as bridges from the air. The disadvantage of the drone is that it is not ideal for detailed structural inspections, because wind can shift the drone while it is in the middle of an inspection. The drone is also not usable within enclosed structures, as it risks crashing. The AETOS drone requires frequent charging and cannot stay airborne for extended periods of time. It is also expensive, prone to damage, and difficult to retrieve from a crash.
Some of the currently available robots pack powerful sensors, multiple cameras, and wall climbing abilities. Such robots are extremely costly and cannot be deployed in large numbers to perform inspections. The risks of damage associated with these robots and the replacement costs are also very high. Damage is a very real consideration, because practically every robot employed to inspect the damaged nuclear reactors at the Fukushima Daiichi site in Japan has failed as of March 2017. An example of an expensive robot is the MagneBike3. The MagneBike is a fairly new robot that is not yet sold commercially but is currently in testing and private development. The MagneBike is a robotic bicycle that features two wheels connected to a main body by a free joint. This joint allows the robot to move freely on any ferrous surface regardless of contours. Each wheel also has two levers attached to its sides and resembles training wheels. The length of each lever is slightly greater than the radius of each wheel. The levers are used to de-link the wheel from the magnetic surface it is connected to, allowing it to traverse smoothly on interior angles. The MagneBike can be set up to support a high definition camera and supports a 3D mapping sensor, that allows it to create a 3D model of its surroundings. The robot is controlled and powered through a cable and is a tethered device for easy retrievability. The disadvantage of the MagneBike however, is that it is very difficult to replace if broken, and is quite expensive if the parts used are anything to go by.
A similar magnetic wheeled robot is the US Navy’s Multi-Segmented Magnetic Robot4 (MSMR). The MSMR is a naval robot designed for ship hull inspection. While the MSMR is not designed for above ground structural inspection, it could be easily adapted to inspect structures. Also, inspecting a ship’s hull and inspecting an industrial structure, are not dissimilar tasks. The MSMR is a 3-segmented robot, with each segment being a metal box containing electronics, with two wheels attached to its sides. The segments are connected by flexible or jointed connectors.
Each wheel can work independently, and the robot is able to scale 3D obstacles easily when all wheels work together. The wheels are magnetized and can support the robot. The disadvantages of the robot are that it does not have a tether and is thus powered only by a battery. This is disadvantageous, because it makes the robot significantly more difficult to control and limits the robot’s inspection life. The MSMR is also currently unreleased and used by the Navy only. The robot will probably remain that way for the foreseeable future.
Another example of an inspection robot is the Omni-Directional Wall-Climbing Microbot5. The Microbot is a miniscule circular robot weighing in at only 7.2 grams. It has a diameter of 26 mm and a height of 16.4 mm. The bot is currently in the final stages of testing and is not yet available commercially. The robot supports 3 magnetic wheeled micromotors with 360° turning capability. The wheels allow it to traverse most ferrous surfaces with ease. The Microbot can be set up to support a single micro camera. The camera can send back simple images and videos to the controller. The robot is also tethered. It is connected to its controller by copper wires that can be insulated for protection. While the robot is inexpensive and can be used in groups, it only can support a single camera, and the tether is weak. It also lacks any room for expansion and cannot support any sensors.
There are robot designs that use suction cups or negative pressure generated by propellers to attach to surfaces. The suction cups offer limited mobility compared to magnetic wheels and are not suited for heavy robots equipped with multiple cameras and sensors. Moreover, the suction power will degrade with time due to mechanical wear. The negative pressure system requires considerable power and constant power. If power is lost, the robot will become detached from the surface. Each of the designs that has been tried before has its advantages and disadvantages, but none has solved the inspection problem completely. The literature review enabled me to survey the landscape, learn about what has been tried before, and come up with my own design.
1. Specification of Requirements
The inspection robot would have to meet several constraints. The first constraint on the robot would be size. An inspection robot would ideally be small. Some of the spaces that the robot would inspect are less than a foot in width and height. The size is limited in this project to 25x25x25 cm. The smaller size increases the mobility and versatility of the robot in complex environments, such as bridge beams. An advantage of the small size is also that the robot will consume less power and be easier to manipulate. The robot would also have to be tethered. A tethered robot would be able to send more data faster and more reliably than a wireless robot.
The controller of the robot would not have to worry about the robot leaving the range of the wireless signal, and would also be able to easily extract the robot in case of an accident or failure. In addition, an inspection robot would have to support multiple cameras for thorough inspection and navigation. The live camera footage from the robot to the controller would be necessary for the robot to be accurately driven through the structure it is inspecting, and to warn the controller of immediate hazards. Another constraint the robot would need to meet is that it would need to be able to climb on ferrous surfaces. The easiest way to meet that constraint would be for the robot to have magnetic wheels or a magnetic body thus enabling the robot to scale ferrous surfaces with ease. This is because ferromagnetic materials, such as mild steel, low alloy steel and iron, are primary materials in the construction of such structures. Lastly, the robot should be inexpensive, preferably with a cost under $200. An inexpensive robot is easy to replace, and when inspecting older structures, it would not be surprising for a robot to get damaged. An inexpensive robot also means that more robots can be bought and used for a task, which can increase inspection efficiency greatly.
4. Design and Development of the Robot
4.1. Prototype 1: LEGO EV3
In order to design a robot that meets the constraints stated above, I began prototyping with a LEGO EV3 control module and other LEGO parts. I originally started working with LEGOs for prototyping because it is easy to build with LEGOs and creating a robot is fairly simple. The EV3 module is a programable robot core that controls the LEGO robot and was already available at home. Using LEGO pieces, it was fairly easy to create a sturdy robot body with 4 attached motors and wheels. When starting out with the EV3, I tried to make a flat, compact design for my robot. Because of the way LEGO pieces fit together, that idea started to fail when it came time to attach my 3rd and 4th motor. I was unable to fit my motors to my control module. Next, I moved towards an angular design, with the module suspended above the rest of my robot, and the motors arching from a main frame. After designing the main support frame, which fit comfortable under the controller, I was able to design motor supports. The supports were downward sloping arms that projected from the main frame and attached to the motors. The motors were thoroughly pinned to the end of the supports to prevent structural failure during testing. To further stabilize the motors and their supports, I linked each motor to the nearest motor with rigid connectors. The connector also prevented one motor from going to much faster than the others, because it served to link motors together and create a secondary framework.
After finishing with the structural design and construction of the LEGO robot, I moved to the design of the wheels. For the wheels, I started out with 4 standard size EV3 wheels. Each wheel had a radius of 17 mm and had a width of 17 mm. Each wheel additionally came with an attached, hollow, rubber tire. To configure the wheels for magnetic movement, I started out by removing the tires. After removing the tires, only the bare plastic wheel was left. The plastic had fairy deep indentations in it, that consistently covered most of the wheel. Because of the indentations, I was unable to directly attach magnets to the wheels. The magnets I used for the LEGO robot were D51-N52 disks from K&J Magnetics6. D51-N52 magnets are neodymium- iron-boron (NdFeB) disk magnets that have a diameter of 5/16” (8 mm) and a thickness of 1/16”
(1.6 mm). I chose to use those magnets because they were small enough for me to be able to wrap a chain of them around the wheel and create a magnetic band. Each D51-N52 has a pull force of 2.05 lb (9.1 Newton) when stuck directly to a steel plate. With four wheels wrapped in the magnets, the magnetism would be more than sufficient to hold up the LEGO robot, which is shown in Figure 1.

I tested methods of attaching magnets to the wheels of my robot. I originally tried wrapping a paper around the wheel and super-gluing magnets to that paper. That idea did not work because the paper was too weak to provide a firm surface for the magnets, and was not
strong enough to keep the magnets from clumping together and leaving the wheel. Next, I tried filling the holes on the wheels with clay or playdoh, and attaching magnets over it. This idea also failed because neither material would stick to superglue. After neither of the ideas worked, I experimented to see if a hybrid of the two ideas would work. I filled the indentations in the wheel with folded and compressed strips of paper. I then superglued the strips in place.
Afterwards, I wrapped paper that was folded and reinforced by thin strands of metal around the wheel. The reinforced paper was a sturdy yet flexible enough surface for me to superglue magnets. After attaching magnets successfully to all four wheels, I wrapped each wheel with duct-tape instead of using a tire. The reason I chose not to use a tire was that a tire would reduce the pull force of the magnets too much due to its thickness, while duct-tape would not significantly reduce the pull force while still offering traction. After wrapping the wheels, I ran a LEGO axle through each wheel and used it to attach each wheel to my motors.
The attachment of the wheels marked the end of the development of my first prototype. I tested the prototype by pressing it to a steel door. The robot was able to stick tightly to the door without slipping. The robot failed to meet several design constraints: It was larger than 25x25x25 cm, cost more than $200, was not tethered, required batteries, and did not support cameras.
However, this initial prototype met a key objective. The true objective of my first prototype was to help me understand how to attach a robot to a ferrous surface efficiently with magnets, and help me understand how to design a robot and wheels to solve the inspection problem.
4.2 Material and Component Selection for the Second Prototype
After building my first prototype robot with LEGOs, I decided to select components, and design and visualize my next prototype on the computer before beginning construction. First, I decided that I would use a Raspberry Pi as the core of my future prototypes. The reason I chose the Raspberry Pi was that the Pi is a fairly powerful circuit board despite being very light and compact. The Pi can connect to motor control boards, while still having USB and Ethernet capabilities. In addition, the Pi is a very inexpensive computer and comes with a free OS package. Figure 2 is a photograph of the Raspberry Pi 3.
Next I decided to use the L298N motor control board to control my motors. The L298N is a fairly simple motor controller that can control up 2 DC motors. The motor controller is documented as being able to handle voltages of up to 35 V. Since most of the motors I wanted to use were in the 6 V-12 V range, the L298N was ideal for me. The board itself is quite small, only being a third the size of a Raspberry Pi. Because of this simplicity, it is easy to buy multiple L298N’s at a low cost. I also decided that I would start out with a single camera for my first prototype with the Raspberry Pi. The camera I chose to use is the Raspberry Pi NoIR camera.
This NoIR camera is a Pi compatible camera that is designed for night vision. While structures like bridges may be lit, the interior of tanks will probably be dark; so I chose the Pi NoIR camera instead of the standard Pi camera. I also chose the NoIR camera because it is built for the Raspberry Pi and would be easier to use than any other camera.
For my motors, I chose standard 6 V DC plastic Arduino motors. I chose these motors even though they were Arduino motors, because I knew that my driver board could run any DC motor within its voltage limit. I did an engineering mechanics calculation, as discussed below, to estimate the motor torque needed. The plastic motors are very easy to use and wire, and are also inexpensive. If one of the motors broke, it would be easy to replace with a new motor. The motors also come with plastic wheels that are large enough to support and move the robot, yet small enough to be easily controlled. In addition to my two drive motors, I wanted to use another motor to create a lever mechanism under the robot that could prop it up. The mechanism would be used to lift the robot’s front end off the ground so that it could attach to a ferrous surface better. I planned on mounting the robot on a simple plastic robot chassis, and using metal strips to form an elevated platform for any part that could not be accomodated on the chassis itself. I decided to power the L298Ns with a 4-AA battery pack or two 2-AA battery packs. The Raspberry Pi was designed to receive power from a USB cable that extended to an electrical outlet. The robot would be controlled by a wired Xbox 360 controller connected to it using a USB cable. I decided to use an Xbox Controller because it has a directional pad, which would be ideal for controlling the robot’s movement. It also has extra buttons which could be assigned to different tasks within the robot’s code such as camera controls. For the magnets, I decided to continue using D51-N52 magnets because I had proven that using them to create a magnetic band around a wheel was a feasible method of creating a magnetic wheel with my first prototype.
4.3 Computer Aided Design (CAD) of the Second Prototype
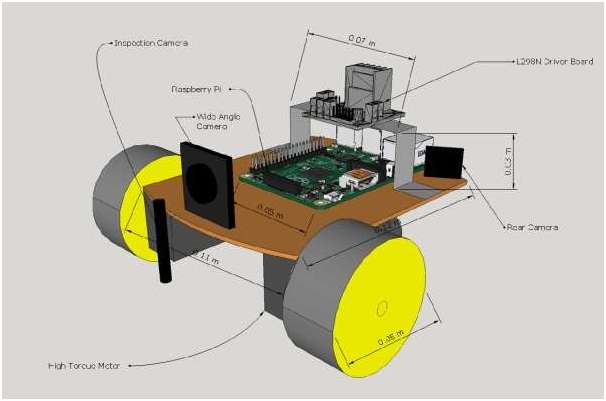
After deciding on the materials and components I would use to make my 2nd prototype, I moved on to constructing a CAD drawing of my prototype, so that I would be able to construct it with ease once the parts I specified arrived. To make the CAD drawings, I used a software called SketchUp, because the software was free, easy to learn on my own, and easy to use. Using online and physical measurements (once the parts arrived) of the parts I planned to use to make my 2nd prototype robot, I was able to construct a realistic 3D CAD drawing of my robot prototype as shown in Figure 3. I then further refined my prototype taking optimal screw locations into consideration. After a few iterations of adding design features and refining the details, I was able to get a satisfactory 3D model of my robot. This served to simplify the hardware portion of my project, as I just had to construct a physical copy of the computer model using real parts.
4.4 Prototype 2a: Pre-Made Chassis
Building Prototype 2a
After all of my parts had arrived and my CAD drawings were finished, building my robot was a simple matter. When constructing the robot, I started out by drilling holes for the Raspberry Pi to be mounted on. To plot the points that I would drill on the plastic chassis, I held the Pi down on top of the rear end of the chassis and used a thin pencil to mark the area under each screw hole on the chassis. I then selected a drill bit that was slightly larger than the screw holes on the Pi to drill each hole with. I then similarly drilled holes at the front of the chassis to accommodate the driver board. To mount the driver board and Raspberry Pi, I used #4-40 bolts and nuts. After mounting both boards, I used the provided screws to attach the rear wheel and
motors to pre-cut holes on the chassis. The chassis, motors, and rear wheel came together with nuts, bolts and instructions, so attaching both components to the chassis was easy.
For this prototype, I used heavy duty double sided tape to attach a third motor to the underside of the robot, directly in between both drive motors. I then took four popsicle sticks and glued them together lengthwise in sets of two. As a result, I got two very thick popsicle sticks. I then cut the popsicle sticks in half, and sketched the end of the motor axle on the end of each half popsicle sticks. I then used a drill to carve out a hole in each of the new sticks that would accommodate the motor axle. As a result, I got 4 thick, half-length, drilled popsicle sticks. I then chose the two sticks that fit best, and attached them to each end of the axle on the middle motor. I secured the popsicle sticks with hot glue. The purpose of this motorized contraption was to serve as a lifter that would push the robot off the surface it was on once the motor was activated. This device was designed to allow the robot to detach itself from a ferrous surface. It would also enable the robot to elevate its main magnetic wheels off the ground so that it could attach itself to a ferrous wall from another surface. This is one of several unique design features of this project. The magnetic wheel design is another innovative feature.
After attaching the third motor, I used perforated metal hanger tape to create bridge-like structures above the driver board and Raspberry Pi. The hanger tape served as a secondary surface on which additional parts could be mounted. Because of the perforations, it was easy to drill holes in the chassis to fit the metal hanger tape, and secure it with leftover bolts and nuts. On top of the hanger tape bridge at the front of the robot, I attached a second driver board to control the third motor since each board can only control two motors. I was able to attach the driver board using double sided tape. With more double sided tape, I was able to attach a 4-AA battery holder to the top of the rear metal hangar to power the main driver board. I also attached two 2-AA battery holders to the front of my robot to power the second driver board.
I finished this second prototype by hot gluing the Raspberry Pi NoIR camera to the front of metal hanger tape bridge. After building the robot, all that remained was to magnetize the wheels. I removed the tires from the wheels and laid a layer of double sided tape over each wheel. The plastic wheels and motors are shown in Figure 4. I the stuck the small circular D51- N52 magnets in a circle around the rim of each wheel, so that there were two rings on each wheel. After adding all the magnets, I covered both wheels in a single layer of duct tape to protect the magnets. To magnetize the back wheel, I hot glued magnets in a ring around the wheel and then wrapped them in duct tape. The reason duct tape was used was because it is thin enough to not reduce the pull force significantly, but strong enough to protect the magnets.

Wiring Prototype 2a
After attaching all of the components of my robot, I began wiring them together. The power for the Raspberry Pi came in through the micro USB port on its side. I then wired the battery packs to their respective driver boards. The motors were also connected to the driver boards using wires that came with the motors. I soldered the wires to the power leads on the motor and connected them with screws to the driver board. I then wired the GPIO pins on the Pi to the driver boards. The GPIO pins are general purpose input/output pins on the Raspberry Pi. Some pins are used for ground and power, while some can be used to send signals through a wire. I wired GPIO 2 & 6 to one driver board and 4 & 9 to the other driver board. Those pins were 5 V pins and were used to enable motor movement and control through the driver boards. I then wired pin 11, 12, 13, & 15 to the first driver board, and wired pins 16, & 18 to the other driver board. Those pins were used for sending the actual motor control signal. Each motor
required two pins for control, and since the robot used 3 motors the driver boards required 6 connected signal GPIO pins for motor control, in addition to a 5V and ground per board. After I connected the necessary GPIO pins, I connected an Ethernet cable between my Pi and my laptop, so that my laptop would be able to have a remote desktop connection with my Raspberry Pi, eliminating the need for a monitor, keyboard, and mouse. I also connected a powered hub via USB to my Pi. The hub was connected to an Xbox controller, so that I would be able to control the robot through the Xbox controller.
Programming Prototype 2a
The hardest part about designing my 2nd prototype was the code. With my first prototype, it was merely a hardware model; it ran no code. My reason being, with my 1st prototype, try as I might, I was unable to get all 4 motors to move simultaneously with code. The first prototype was also created mainly to test the magnetic wheel concept and to help me come up with an ideal design for future prototypes. On the Raspberry Pi, I coded with Python, because it was the only language for the Raspberry Pi that I understood. But even before I started on my code, I had to set up my robot to be remote desktop compatible with my laptop.
To set up my Pi, I had to temporarily attach a monitor, keyboard, and mouse to the Raspberry Pi. Afterwards, I booted up the Pi and set a static IP for it over Ethernet. I chose 192.168.1.10 because it was a simple and easy address. To set the IP I had to edit
/ect/dhcpcd.conf in my Pi. The dhpcd.conf file controls the IP and network connection of the Pi; to set a static IP I had to add the lines to the beginning of the file:
interface eth0
static ip_address=192.168.1.10 static routers=192.168.1.1
After setting the static IP of the Pi, I installed the Linux package tightvncserver. Tightvncserver is a package that allows for a VNC (virtual network connection) server to be set up on the Raspberry Pi. Remote Desktop connections are run through VNC servers. After setting up the VNC server, I was able to create a Remote Desktop connection to my Raspberry Pi through my
laptop. After confirming that I could access my Pi, I disconnected my monitor, keyboard, and mouse. I then began the coding for the robot.
First, I needed a way to find out which GPIO pin corresponded to what motor on my Pi. Each GPIO pin when activated, rotates a single motor either forward or backward at a constant speed. Thus, each motor has two corresponding GPIO pins, a forward motion controller, and a backward motion controller. To find out what each GPIO pin corresponded to, I wrote a program that individually tested each GPIO pin, so that I would be able to note down which GPIO pin did what. I recorded my observations through comments on my program:
import RPi.GPIO as GPIO from time import sleep
GPIO.setmode(GPIO.BOARD)
GPIO.setup(12,GPIO.OUT) #Left Backward GPIO.setup(11,GPIO.OUT) #Left Forward GPIO.setup(13,GPIO.OUT) #Right Forward GPIO.setup(15,GPIO.OUT) #Right Backward GPIO.setup(16,GPIO.OUT) #Lifter Out GPIO.setup(18,GPIO.OUT) #Lifter In
GPIO.output(12,GPIO.HIGH)
sleep(2) GPIO.output(12,GPIO.LOW)
sleep(1)
GPIO.output(11,GPIO.HIGH)
sleep(2) GPIO.output(11,GPIO.LOW)
sleep(1)
GPIO.output(13,GPIO.HIGH)
sleep(2) GPIO.output(13,GPIO.LOW)
sleep(1)
GPIO.output(15,GPIO.HIGH)
sleep(2) GPIO.output(15,GPIO.LOW)
sleep(1)
GPIO.output(16,GPIO.HIGH)
sleep(0.5) GPIO.output(16,GPIO.LOW)
sleep(1)
GPIO.output(18,GPIO.HIGH)
sleep(0.5) GPIO.output(18,GPIO.LOW)
sleep(1)
Next, I needed software or code that would enable my Raspberry Pi to receive and understand signals sent to it by the Xbox controller. Xboxdrv is an Xbox controller driver for Linux. I installed it and used it to try to connect my Pi to my Xbox controller. Normally running the command ‘sudo xboxdrv’ in the prompt will display the inputs of connected Xbox controller in the command prompt window. My Xbox controller however, was not made by Microsoft, so it was not supported normally by xboxdrv I fixed the problem by running the command:
sudo xboxdrv –device-by-id 1bad:f02e –type xbox360 –detach-kernel-driver –mimic-xpad
I was able to create this command after researching how to use xboxdrv and how to modify the normal function with code. With this command, I identified the connected controller as an Xbox controller using its device id which was 1bad:f02e. This command allowed me to view the inputs from the controller in the command prompt. I needed a way to access the input values from a
Python program, so that I would be able to use the values to control my robot. After some searching online, I found a Python program that received and displayed Xbox controller input values on Github7. The code was by martinohanlon. I downloaded the code onto my Raspberry Pi and started working on modifying it to control the motors on the robot based on the values it received. The problem I faced was that the code was so long and complex, that I was unable to tell where the input value from the Xbox controller was read. To solve that problem, I went through the program and I made a series of print statements that printed the variables of the program as it ran. Through the process of observing the values as buttons were pressed, and deleting print statements, I was able to find the main event system in the program at line 265:
#run until the controller is stopped while(self.running):
#react to the pygame events that come from the xbox controller for event in pygame.event.get():
#thumb sticks, trigger buttons
if event.type == JOYAXISMOTION: #is this axis on our xbox controller
if event.axis in self.AXISCONTROLMAP: #is this a y axis
yAxis = True if (event.axis == self.PyGameAxis.LTHUMBY or event.axis == self.PyGameAxis.RTHUMBY) else False
#update the control value self.updateControlValue(self.AXISCONTROLMAP[event.axis],
self._sortOutAxisValue(event.value, yAxis)) #is this axis a trigger
if event.axis in self.TRIGGERCONTROLMAP: #update the control value
self.updateControlValue(self.TRIGGERCONTROLMAP[event.axis], self._sortOutTriggerValue(event.value))
#d pad
elif event.type == JOYHATMOTION: #update control value
self.updateControlValue(self.XboxControls.DPAD, event.value)
#button pressed and unpressed
elif event.type == JOYBUTTONUP or event.type == JOYBUTTONDOWN: #is this button on our xbox controller
if event.button in self.BUTTONCONTROLMAP: #update control value
self.updateControlValue(self.BUTTONCONTROLMAP[event.button], self._sortOutButtonValue(event.type))
Within the main event system, I searched for the component that handled the directional pad (d- pad) on the Xbox controller, as I was planning on using it to control the motors on the robot.
After finding the directional pad control component, I added some statements to the end that sent signals through the GPIO pins to the motors whenever a certain direction was pressed on the D- Pad:
#d pad
elif event.type == JOYHATMOTION: #update control value
self.updateControlValue(self.XboxControls.DPAD, event.value) if event.value == (0,1): #Forward
GPIO.output(11,GPIO.HIGH) #Left Forward GPIO.output(13,GPIO.HIGH) #Right Forward
elif event.value == (0,-1): #Backward GPIO.output(12,GPIO.HIGH) #Left Backward GPIO.output(15,GPIO.HIGH) #Right Backward
elif event.value == (1,0): #Right GPIO.output(11,GPIO.HIGH) #Left Forward
GPIO.output(15,GPIO.HIGH) #Right Backward elif event.value == (0,1): #Left
GPIO.output(12,GPIO.HIGH) #Left Backward GPIO.output(13,GPIO.HIGH) #Right Forward
GPIO.output(12,GPIO.LOW) GPIO.output(11,GPIO.LOW) GPIO.output(13,GPIO.LOW) GPIO.output(15,GPIO.LOW)
After successfully configuring the motors, my next challenge was to code the Raspberry NoIR camera. The Pi camera came with a Python camera package. Coding it so that pictures were taken or videos were recorded every time certain buttons on the Xbox controller were pressed was fairly easy.
#button pressed and unpressed
elif event.type == JOYBUTTONUP or event.type == JOYBUTTONDOWN: #is this button on our xbox controller
if event.button in self.BUTTONCONTROLMAP: #update control value
self.updateControlValue(self.BUTTONCONTROLMAP[event.button], self._sortOutButtonValue(event.type))
if event.button == 0 and event.type == 10: camera.capture(‘image' + imgNum + ‘.jpg') imgNum = imgNum + 1
if event.button == 1 and event.type == 10: if isRec == False:
camera.start_recording(‘video' + recNum + ‘.h264') isRec = True
else:
camera.stop_recording() isRec = False
if event.button == 1 and event.type == 10: if isPrev == False:
camera.start_preview() isPrev == True
else:
camera.stop_preview() isPrev == False
For this portion of the code, I did have to make variables to serve as counters every time a picture or video was taken, so that they would be numbered. I also had to make Boolean variables that determined whether a video was being taken, to prevent the robot from trying to take another video while one was already recording. After coding the camera, I was finished with programming the robot.
Testing Prototype 2a
The first thing I recorded was the mass of the robot. Using a standard kitchen scale, I recorded the mass of the robot to be 0.66 kg. While not being especially light, prototype 2a was significantly lighter than prototype 1, which had a mass of 0.92 kg without cameras. Prototype 2a was also measured to be 15 cm long x 18 cm wide x 12 cm tall. Prototype 2a could meet the size constraint, which was another improvement over prototype 1. Prototype 2a could stick to ferrous surfaces. While the motor of prototype 1 could not overcome the magnetic pull force and move the robot, prototype 2 could move the robot downward or sideways but not upward when attached to a vertical steel wall. The 3rd motor on the robot that was planned for lifting of off surfaces was also unable to function because of a lack of torque. Prototype 2a had only mounted 1 camera, and thus failed the multiple camera requirement. However, prototype 2a was an improvement over prototype 1. Prototype 2a only cost about $120 to build compared to prototype 1, which cost more than $400 even without cameras.
4.5 Engineering Mechanics Calculations
I calculated force and torque using equations from the literature as shown below.
Force and Torque Equations
Figure 5 shows a sketch of the robot climbing an inclined plane and the forces present.
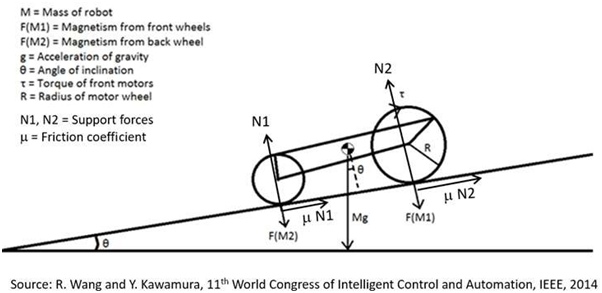
| For a robot at rest in the plane: | m*(N1 + N2) = Mgsinq | (1) |
| Perpendicular to the plane: | N1 + N2 = F(M1) + F(M2) + Mgcosq | (2) |
| For a vertical wall q = p/2. | N1 + N2 = F(M1) + F(M2); m*(N1 + N2) ≥ Mg | (3) |
| The required magnetic force is | F(M1) + F(M2) ≥ Mg/m | (4) |
With two motors, the torque needed from each is t ≥ MgR/2 (5)
Force Calculation for Magnet Placement
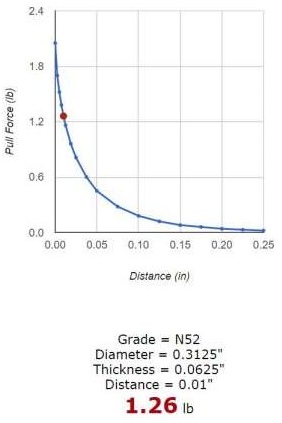
The paper by Wang and Kimura (IEEE 2014) shows that the friction coefficient for tape covered wheel on metal m = 0.45. The mass of my robot prototype 2a is M = 0.655 kg. The acceleration of gravity g = 9.81 m/s2. From equation (4), the required magnetic force = 14.5 Newton. The pull force of the N52 magnet away from a steel surface has been tested and reported by the manufacturer KJ Magnetics. It is shown for different distances in Figure 6. The thickness of the duct tape I used is 0.01”. At a distance of 0.01”, the pull force is 1.26 lb per magnet according to the data plotted in Figure 6. In SI units, this pull force per magnet = 5.6 Newton. To get a magnetic force of at least 14.5 Newtons calculated from equation (4), we need at least 3 magnets in contact at all times (one per wheel). The m value of 0.45 is only an estimate. If it is lower (say 0.25), the required magnetic force is higher, about 26.1 Newton.
Thus, for safety, we need 2 rows of magnets per wheel.
Torque Calculation for Motor Selection
Torque is important, because it is the rotational force (force multiplied by radial distance) that the motor must generate to move the robot. From equation (6), we know that the torque must be greater than MgR/2 for each of the front wheel motors. For prototype 2a, this works to torque being more than 0.08 Newton meter per motor. The plastic encased motors I used in the prototype 2a (Figure 4) were rated by the manufacturer as 0.1 Newton meter each. In my tests, prototype #2a could stay attached to a vertical surface and climb down. However, it struggled to climb up the vertical wall. The torque was barely enough to fight gravity. The results of this test of prototype #2a show that the force and torque calculations were correct. The lesson I learned from building and testing prototype 2a is that the robot should be lighter or a motor with greater torque should be used. The use of CAD and mechanics calculations made the design and development process systematic and logical. Figure 7 shows the underside of prototype 2a. The three motors and the popsicle sticks can be clearly seen.
4.6 Prototype 2b: Pre-Made Chassis
After developing and testing Prototype 2a, I realized that there were multiple changes I could make to it to make it fit the constraints better, without constructing an entirely new bot. So instead of starting from scratch, I decided to make a series of modifications and upgrades to Prototype 2a, resulting in the creation of Prototype 2b.
Building Prototype 2b
The first change I made to prototype 2a was that I removed all the motors. The motors did not work as expected for climbing up a vertical wall because of lack of torque; so, all of them had to be replaced or removed. I replaced the drive motors with two new larger motors, and I simply removed the third motor without replacement. The new motors were Uxcell 12V high torque gearbox motors. They were chosen, because their torque rating was much higher than that of the motors they replaced, but these new motors were heavier. I fastened both motors to the underside of the robot, where the previous motors had been using strips of double sided tape for preliminary testing. The new motors had a mass almost 100 g more than that of the old motors and so adding both new motors added almost 200 g to the mass of the robot.
I removed the driver board that controlled the third motor, because there was no longer a third motor on the robot, so there was only a need for a single driver board. Next, I removed all of the battery packs on the robot. Battery packs add unnecessary mass to a robot, and only limit its inspection life. Additionally, using batteries increases chances of motor failure when the robot is in deployment, because batteries might run out of battery power in the middle of a run, resulting in the need for an emergency retrieval. I then moved the remaining driver board onto the metal hanger above the Raspberry Pi, where the 4-AA battery pack had been previously. This allowed me to remove the metal hanger at the front of the robot because it was not being used. I also removed two posts with magnetic disks at the rear of the robot that were included in Prototype 2a to increase the stability of the rear. I found out through testing that the posts were not needed.
At this stage, I encountered a major problem. My wheels were no longer compatible with my motors because the new motors had a different shaft compared to the old motors. I tried drilling and cutting the wheel wells to make the wheels fit the motors, but neither solution worked. After some research on what items fit a D shaped motor shaft, I found out that oven knobs often fit D shafts. After buying some oven knobs, I tested them to see if they attach to the motors. After finding out the oven knobs were compatible with the new motors, I sawed the top off the oven knobs, resulting in flat disks that fit onto the new motors. I then drilled out the wheel well on the wheels, after which I superglued the disks to the wheels. By supergluing the disks to the wheels, I made it so that they would be able to attach to the motor. After attaching the wheels and motors, I set up the cameras. I hot glued the Pi NoIR camera to the back of the robot and made it face backwards for my rear-view camera. I then took a wide-angle, fish-eye camera, and hot glued it to the front of my robot facing forwards for my main camera. I then double sided taped and hot glued an endoscopic inspection camera to the front rim of the chassis facing downwards. The use of oven knobs to connect wheels to the new motor shaft is an innovative solution developed in this project.
Wiring Prototype 2b
After modifying prototype 2a, there were many components to re-wire. I had to re-solder a wire to the power leads of the motors and connect it to the remaining driver board. I then removed all of the wires connected to GPIO 4, 9, 16, or 18, as they were no longer in use. I also decided to use a 12 V power cable to power the driver board instead of a battery pack. To do so, I cut the output end of the power cable off, so that all that remained was the adapter and a length of wire. I then separated the two strands of power wire, one being positive and the other being negative, and stripped the wires so that both wires were exposed at the end. After twisting and tightening the exposed wire, I connected the positive wire to the ground slot on the driver board, and the negative wire into the voltage slot on the driver board. I left the NoIR camera connected to the Pi, but I connected both the other cameras to my laptop so that my laptop directly received feeds directly from the cameras instead of getting them through the Pi, with the exception of the NoIR camera. To finish, I swapped the Xbox Controller with a Super Nintendo Entertainment System (SNES ) controller. An SNES controller is a much lighter and simpler controller than an Xbox controller and unlike the Xbox controller which requires a powered hub for power, an SNES controller can be powered by the Raspberry Pi. The two controllers are shown side by side for comparison in Figure 8.

Programming Prototype 2b
Since the Raspberry Pi had already been completely set up with the previous prototype, I was able to dive straight into programming. While no new code was needed to test the motors, since the previous motor test program worked, a new controller code became necessary because I changed the controller and was no longer using an Xbox controller. Because of the simpler nature of the SNES controller, there was no driver similar to xboxdrv for the SNES controller.
The Pi is capable of interpreting the input from the SNES controller by default. After doing some research and looking into how to interact with an SNES controller through Python, I wrote the following controller program from scratch:
import pygame
import RPi.GPIO as GPIO GPIO.setmode(GPIO.BOARD)
GPIO.setup(12,GPIO.OUT) #Left Backward GPIO.setup(11,GPIO.OUT) #Left Forward GPIO.setup(13,GPIO.OUT) #Right Forward GPIO.setup(15,GPIO.OUT) #Right Backward
global hadEvent global x
global y global a global b global up global down global left global right
hadEvent = False x = False
y = False a = False b = False up = False
down = False left = False right = False
pygame.init()
pygame.joystick.init()
j = pygame.joystick.Joystick(0) j.init()
def game_controller(events): global hadEvent
global x global y global a global b global up global down global left global right
for event in events:
if event.type == pygame.JOYBUTTONDOWN: hadEvent = True
x = j.get_button(0) y = j.get_button(3) a = j.get_button(1) b = j.get_button(2)
if x == 1: x = True
print(“x”) elif y == 1:
y = True print(“y”)
elif a == 1:
a = True print(“a”)
elif b == 1: b = True print(“b”)
elif up == 1: up = True print(“up”)
elif event.type == pygame.JOYBUTTONUP: hadEvent = False
x = j.get_button(0) y = j.get_button(3) a = j.get_button(1) b = j.get_button(2)
if x == 1:
x = False elif y == 1: y = False elif a == 1: a = False elif b == 1: b = False
elif up == 1: up = False
elif event.type == pygame.JOYAXISMOTION: hadEvent = True
if event.axis == 1:
if event.value <= -1:
up = True print(“up”)
elif event.value >= 1: down = True print(“down”)
else:
down = False up = False
elif event.axis == 0:
if event.value <= -1: left = True print(“left”)
elif event.value >= 1: right = True print(“right”)
else:
right = False left = False
while True: game_controller(pygame.event.get())
if up == True: #Forward GPIO.output(11,GPIO.HIGH) #Left Forward GPIO.output(13,GPIO.HIGH) #Right Forward
elif down == True: #Backward GPIO.output(12,GPIO.HIGH) #Left Backward GPIO.output(15,GPIO.HIGH) #Right Backward
elif right == True: #Right GPIO.output(11,GPIO.HIGH) #Left Forward GPIO.output(15,GPIO.HIGH) #Right Backward
elif left == True: #Left GPIO.output(12,GPIO.HIGH) #Left Backward GPIO.output(13,GPIO.HIGH) #Right Forward
else:
GPIO.output(12,GPIO.LOW) GPIO.output(11,GPIO.LOW) GPIO.output(13,GPIO.LOW) GPIO.output(15,GPIO.LOW)
This code operates by importing Pygame, which is a Python package. Pygame is used for constructing videogames through Python. It adds several features, such as interpreting and translating input values from a video game controller. Because of the simplicity of an SNES controller, there were no extra steps needed. Towards the beginning of the program, I defined the GPIO pins to be used for motor control. I then listed variables I planned to use, and assigned the connected controller to pygame.joystick() and then j. I then created an event system where a value sent by the controller is defined as an event, for example, pressing a button or moving a joystick. I then specified the events I care about, such as movement on the directional pad (d- pad) or a button being pressed. I assigned a value of 1 to a variable if the event it is connected to occured. I also wrote additional code to convert the numeric value 1 to the Boolean True. At the end, there is an infinite loop that fetches the values of events that were triggered. If any of the d- pad values are triggered, the program sends signals to the motors through the GPIO pins. After running this code, the robot responded smoothly to the SNES controller. I did not need any other code for controlling this prototype.
Testing Prototype 2b
Once again, I started by recording the mass of the robot. Using a standard kitchen scale, I recorded the mass of the robot to be 0.71 kg. Prototype 2b ended up being heavier than prototype 2a, despite the removal of the battery packs, but this can be attributed to the motors which were heavier in prototype 2b. Prototype 2b was measured to be 15 cm long x 18 cm wide x 12 cm tall. Prototype 2a and 2b are the same size despite the changes between the two, the overall structure of the robot did not change. Prototype 2b was once again able to meet the size constraint. Prototype 2b had the ability to attach to ferrous surfaces and was the first prototype that could climb up on vertical ferrous surfaces. Figure 9 shows Prototype 2b climbing a vertical steel door. Prototype 2b mounted 3 cameras, and all of them sent back acceptable feeds, which was a large improvement over prototype 2a. Prototype 2b cost $170 to build compared to the $120 of prototype 2a. This increase can be attributed to the cost of cameras and the cost of better motors.
4.7 Prototype 3: Custom Polycarbonate Chassis
After building the last two prototypes, I wanted to apply the knowledge I had gained to create a new prototype that was smaller, more compact, and more efficient. To do this, I planned to design my own chassis, and refrain from using tapes and superglue to hold parts together.
Building Prototype 3
To start building my robot, I took a polycarbonate sheet and cut my chassis out of it. For my chassis, I chose a simple 6 cm wide x 11 cm long rectangle. I chose that size and shape because it was simple and based off of preliminary measurements I took, it was the smallest feasible size for mounting the parts I had chosen. After cutting out the chassis with a saw, I smoothed out the edges and corners with a file and sandpaper. I then set the Raspberry Pi on the rear end of the chassis and marked where all of the holes were, so that I would be able to drill them out. I then set the rear wheel on the underside of the chassis and marked holes for it. I also marked holes for the motors I chose at the front of the chassis. The motors I chose were Pololu 12 V gearbox motors with a gear ratio of 298:1. The motors also came with mounting brackets that attached to the motors and had holes for screws. I finally marked a large hole between the Pi and the motors for the inspection camera.
After drilling all of the holes, I screwed down all of the parts except for the Pi. Before I screwed down the Pi, I laid down a thin sheet (4 mm thick) of packing foam underneath where the Pi would be to absorb shock and prevent contact between the metal on the Pi and the bolts and nuts on the robot. I also attached a folded metal hanger tape with the same bolts as the Pi. The hanger tape formed a bridge over the Pi. I cut a smaller 4.5 cm wide x 5.5 cm long piece of polycarbonate to screw to the top of the metal hangar. I screwed a driver board to the top of the smaller polycarbonate. For the wide-angle camera, I folded and cut thin scrap metal to form a pouch for the camera with a hole for the lens. The pouch had sides that folded in and held the camera. The pouch also had a flat bottom that extended out to either side. I screwed the metal pouch down with two of the screws that also held the motors. I slid the inspection camera down into the hole that had been drilled for it. The Pi NoIR camera was held by a retaining block that was hot glued to the top of the Ethernet port on the Pi. For the wheels, I used 60 mm diameter x
8 mm thick Pololu plastic wheels. To magnetize the wheel, I covered it in a thin layer of double sided tape and put the magnets in a ring around it. I the covered the magnets with a single layer of duct-tape for protection and traction. After finishing the wheels, I attached a 3V LED light on either side of the wide-angle camera holder. I also used double sided tape to attach an ultrasonic sensor to the bottom of the robot.
The robot utilizes an HC-SR04 ultrasonic distance sensor. The HC-SR04 is a very common and popular hobby ultrasonic distance sensor. The sensor is also the least expensive and easiest to use of its type to demonstrate sensor integration. The HC-SR04 is designed mainly with compatibility and simplicity in mind, allowing it to be easily connected to a Raspberry Pi or Arduino.
The HC-SR04 functions by sending a sound wave, which bounces off the object at which the sensor points, and then receiving the sound wave. The time between the sending and the reception of the sound wave is recorded and output. The time can then be multiplied by the speed of sound and divided by 2 to identify the distance between the sensor and the surface it is pointed towards. The HC-SR04 has 4 pins for connection purposes. The pins are ground, voltage, trigger, and echo. The ground pin is to be connected to ground. The voltage pin is to be connected to a+5V source. The trigger pin will cause the sensor to produce a sound wave for as long as it is receiving +3V. The echo pin sends back +5V in a burst as long as the wait time for the sensor to receive the signal. The sensor has a range of 2 cm to 400 cm. On my robot, the HC-SR04 serves to demonstrate that an ultrasonic sensor can be mounted underneath the robot. A more expensive, advanced ultrasonic sensor can be mounted to measure the thickness of the metal surface and identify degradation.
Wiring Prototype 3
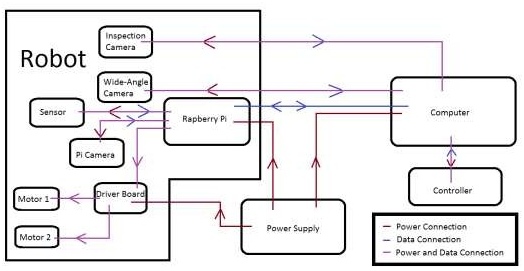
For the wiring of prototype 3, many elements stayed the same from prototype 2b but one changed. Because the Pololu wheels blocked the micro USB port on the Pi, I was unable to use it for power. After some research, I found that I could use the GPIO pins instead. I cut a USB to micro USB cable so that one portion was the USB end and a length of cable. Within the cable were two separate wires. I split and stripped those wired. I then soldered the exposed parts of the wires to the female end of a breadboard jumper. I covered my work with heat shrink tubing. I used a multimeter to tell which end was positive voltage and which end was negative. I connected the positive wire to GPIO 9, and the negative end to GPIO 14. Those two GPIO’s were 5 V & ground respectively. After connecting the USB end of the charging cable to a 5 V adapter, the Pi ran perfectly. Once again, wires were soldered to the leads of my motors, and connected back to my driver board. The driver board was connected to GPIO 11, 12, 13, & 15 for control and GPIO 2 & 6 for 5V and ground. The driver board was also connected to a 12 V power supply. The LED lights were wired and soldered in parallel. They were attached a 330Ω resistor, GPIO 16 & 18 for power, and GPIO 9 for ground. The ultrasonic sensor which was added to this prototype was wired to GPIO 4, 29, 30, and 31. Pin 4 was used for voltage, 29 was for output, 31 was for input, and 30 was for ground. The NoIR camera was once again connected to the Pi, while the other cameras are connected to my laptop. The robot is still controlled by a USB SNES controller. The wiring diagram is shown in Figure 10.
Programming Prototype 3
To save myself the work of setting up and configuring the Pi, I moved the SD card from prototype 2b to prototype 3. Because the only new need of code for prototype 3 was for the ultrasonic sensor, I mainly just simplified and commented my SNES code, only adding a few extra lines, as shown below.
#Developed By Nikhil Devanathan 2017
#Program to control Raspberry Pi robot with wired USB SNES controller #Uses directional pad (d-pad) for motor movement
#Leaves button and triggers open for mapping
#Imports necessary packages into python
import pygame #Package that is used for game controller mapping import RPi.GPIO as GPIO #Allows control over binary pins on Pi from gpiozero import DistanceSensor
#Sets GPIO pins for motor control GPIO.setmode(GPIO.BCM)
GPIO.setup(18,GPIO.OUT) #Left Backward GPIO.setup(17,GPIO.OUT) #Left Forward GPIO.setup(27,GPIO.OUT) #Right Forward GPIO.setup(22,GPIO.OUT) #Right Backward GPIO.setup(23,GPIO.OUT) #Light1\
GPIO.setup(24,GPIO.OUT) #Light2/ Work together to power LED lights
#Conifgures ultrasonic sensor
ultrasonic = DistanceSensor(echo = 6, trigger = 5, threshold_distance = 0.02)
#Creates variables for controller mapping
global hadEvent global x
global y global a global b global up global down global left global right
#Assigns Variables for controller mapping hadEvent = False
x = False y = False a = False b = False up = False
down = False left = False right = False
#Initializing pygame and controller pygame.init() pygame.joystick.init()
j = pygame.joystick.Joystick(0) j.init()
#Defining controller event system def game_controller(events):
#Defining variables for use in controller event system
global hadEvent global x
global y global a global b global up global down global left global right
#Searches for an event in the system for event in events:
#If a button is pressed
if event.type == pygame.JOYBUTTONDOWN: #Set map values
hadEvent = True
x = j.get_button(0) y = j.get_button(3) a = j.get_button(1) b = j.get_button(2)
#If a button is released
elif event.type == pygame.JOYBUTTONUP: #Set map values
hadEvent = False x = j.get_button(0) y = j.get_button(3) a = j.get_button(1) b = j.get_button(2)
#If there is axial montion on the directional pad
elif event.type == pygame.JOYAXISMOTION:
#Set values for y axis hadEvent = True
if event.axis == 1:
if event.value <= -1: up = True
elif event.value >= 1: down = True
else:
down = False up = False
#Set values for x axis elif event.axis == 0:
if event.value <= -1: left = True
elif event.value >= 1: right = True
else:
right = False left = False
lightOn = False #Value to use with b button light control
#Infinite Loop while True:
#Get an event from the event system game_controller(pygame.event.get())
#Motor controls beased on directional pad values if up: #Forward
GPIO.output(17,GPIO.HIGH) #Left Forward GPIO.output(27,GPIO.HIGH) #Right Forward
elif down: #Backward GPIO.output(18,GPIO.HIGH) #Left Backward GPIO.output(22,GPIO.HIGH) #Right Backward
elif right: #Right
GPIO.output(17,GPIO.HIGH) #Left Forward GPIO.output(22,GPIO.HIGH) #Right Backward
elif left: #Left
GPIO.output(18,GPIO.HIGH) #Left Backward GPIO.output(27,GPIO.HIGH) #Right Forward
else:
GPIO.output(18,GPIO.LOW) #Reset GPIO.output(17,GPIO.LOW) GPIO.output(27,GPIO.LOW) GPIO.output(22,GPIO.LOW)
if a: #If a is pressed, for holding light on GPIO.output(23,GPIO.HIGH) #Light1 GPIO.output(24,GPIO.HIGH) #Light2
else: #If a is released, for turning light off GPIO.output(23,GPIO.LOW) #Light1 GPIO.output(24,GPIO.LOW) #Light2
if b: #If b is pressed, for holding solid light if lightOn: #If the light is on
GPIO.output(23,GPIO.LOW) #Light1 GPIO.output(24,GPIO.LOW) #Light2 lightOn = False #Declare that the light is off
else: #If the light is off GPIO.output(23,GPIO.HIGH) #Light1
GPIO.output(24,GPIO.HIGH) #Light2 lightOn = True #Declare that the light is on
if y: #If Y button is pressed
#Scan distance to ground with ultrasonic sensor u = ultrasonic.distance
print u
The only changes made to this program were the addition of comments throughout the program, and the deletion of unnecessary code segments.
Testing Prototype 3
Using a standard kitchen scale, I recorded the mass of the robot to be 0.26 kg. The mass of prototype 3 was significantly reduced compared to every other model. Prototype 3 was measured to be 14 cm long x 9 cm wide x 12 cm tall. Prototype 3 was the smallest of the prototypes and was more than a factor of two smaller than prototypes 2a & 2b. Prototype 3 had the ability to attach to ferrous surfaces and was able to move on ferrous surfaces of speeds of
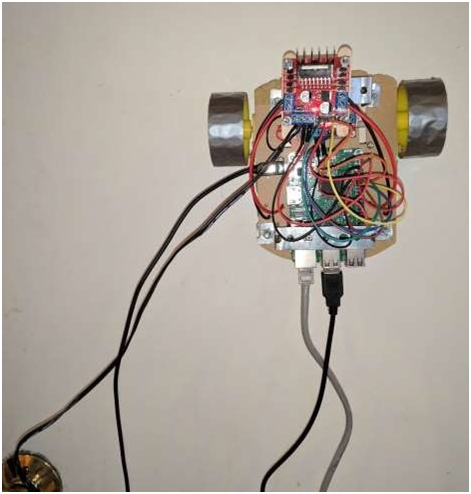
0.18 meters/second, making it the fastest prototype. Prototype 3 mounted 3 cameras, and all of them sent back acceptable feeds. Prototype 3 cost $175 to build compared to the $120 of prototype 2a and the $175 of prototype 2b. This can be attributed to the cost of cameras and the cost of smaller motors. Sample images from the three cameras are shown in Figure 11 and the results of robot testing are shown in Tables 1 and 2. The final prototype can be seen in Figure 12.
Source: Design and Development of a Low-Cost Inspection Robot