
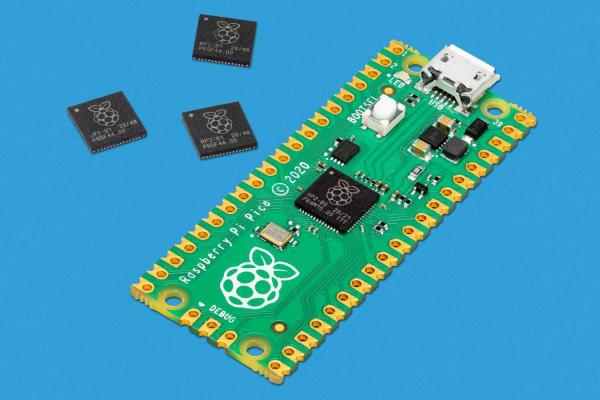
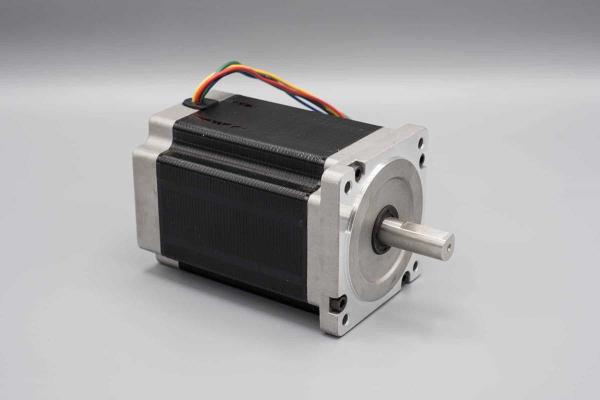
To use a Raspberry Pi Pico with a stepper motor, you will need to follow these steps:
- Connect the stepper motor to the Raspberry Pi Pico using a motor driver board. This will allow you to control the stepper motor using the Pico's GPIO pins.
- Install the RPi.GPIO library, which will allow you to control the GPIO pins from Python. To install this library, open a terminal and enter the following command:
pip3 install RPi.GPIO
- Create a Python script to control the stepper motor. You can use the
GPIO.setup()function to configure the Pico's GPIO pins as output pins, and theGPIO.output()function to set the pin states. You will also need to use thetimemodule to add delays between each step of the stepper motor.
Here is an example of a Python script that will rotate the stepper motor one full revolution in one direction, and then back in the other direction:
import RPi.GPIO as GPIO
import time
# Set up the GPIO pins
GPIO.setmode(GPIO.BCM)
GPIO.setup(4, GPIO.OUT)
GPIO.setup(17, GPIO.OUT)
GPIO.setup(27, GPIO.OUT)
GPIO.setup(22, GPIO.OUT)
# Define the sequence of steps for the stepper motor
steps = [
[1, 0, 0, 0],
[1, 1, 0, 0],
[0, 1, 0, 0],
[0, 1, 1, 0],
[0, 0, 1, 0],
[0, 0, 1, 1],
[0, 0, 0, 1],
[1, 0, 0, 1]
]
# Rotate the stepper motor one full revolution in one direction
for i in range(512):
for step in steps:
GPIO.output(4, step[0])
GPIO.output(17, step[1])
GPIO.output(27, step[2])
GPIO.output(22, step[3])
time.sleep(0.001)
# Rotate the stepper motor one full revolution in the other direction
for i in range(512):
for step in reversed(steps):
GPIO.output(4, step[0])
GPIO.output(17, step[1])
GPIO.output(27, step[2])
GPIO.output(22, step[3])
time.sleep(0.001)
# Clean up the GPIO pins
GPIO.cleanup()
- Run the Python script to control the stepper motor. Save the script to a file, such as
stepper.py, and then run it using the following command:
python3 stepper.py
Note that this is just one example of how to control a stepper motor with a Raspberry Pi Pico. There are many other ways to do this, and you may need to adjust the code depending on the specifics of your setup.