
This compact expansion board plugs directly into the GPIO header on a Raspberry Pi B+ and provides an easy and low-cost solution for driving a pair of small brushed DC motors. Its integrated DRV8835 dual motor driver allows it to operate from 1.5 V to 11 V, making it a great control option for low-voltage motors. The board can deliver a continuous 1.2 A (1.5 A peak) per motor, or a continuous 2.4 A (3 A peak) to a single motor when configured with both channels connected in parallel.
Overview
This motor driver kit and its corresponding Python library make it easy to control a pair of bidirectional, brushed DC motors with a Raspberry Pi Model B+. The expansion board features Texas Instruments’ DRV8835 dual H-bridge motor driver IC, which allows it to operate from 1.5 V to 11 V and makes it particularly well suited for driving small, low-voltage motors. The board can deliver a continuous 1.2 A per channel and tolerate peak currents up to 1.5 A per channel for a few seconds, and the channels can be optionally configured to run in parallel to deliver twice the current to a single motor. The board ships fully populated with its SMD components, including the DRV8835 driver and a FET for reverse battery protection; header pins for interfacing with a Raspberry Pi and terminal blocks for connecting motors and power are included but are not soldered in
 The board uses GPIO pins 5, 6, 12, and 13 to control the motor driver, making use of the Raspberry Pi’s hardware PWM outputs, although the pin mappings can be customized if the defaults are not convenient. Note that it is designed specifically for the Model B+ version of the Raspberry Pi; it is not practical to use this expansion board with a Raspberry Pi Model A or Model B due to differences in their pinout and form factor.
The board uses GPIO pins 5, 6, 12, and 13 to control the motor driver, making use of the Raspberry Pi’s hardware PWM outputs, although the pin mappings can be customized if the defaults are not convenient. Note that it is designed specifically for the Model B+ version of the Raspberry Pi; it is not practical to use this expansion board with a Raspberry Pi Model A or Model B due to differences in their pinout and form factor.
We also have a similar DRV8835 shield for Arduinos and Arduino-compatible boards and a smaller DRV8835 carrier for those using a different controller or with tighter space constraints.
Although the DRV8835 itself works with a minimum motor supply voltage of 0 V, this board’s reverse-protection circuit limits the minimum to 1.5 V. If a lower motor supply voltage is required, please consider using our DRV8835 carrier with motor power supplied through the VMM pin.
Features
- Dual-H-bridge motor driver: can drive two DC motors or one bipolar stepper motor
- Motor supply voltage: 1.5 V to 11 V
- Logic supply voltage 2 V to 7 V
- Output current: 1.2 A continuous (1.5 A peak) per motor
- Motor outputs can be paralleled to deliver 2.4 A continuous (3 A peak) to a single motor
- PWM operation up to 250 kHz (ultrasonic frequencies allow for quieter motor operation)
- Two possible interface modes: PHASE/ENABLE (default – one pin for direction, another for speed) or IN/IN (outputs mostly mirror inputs)
- Board can optionally power the Raspberry Pi base directly through add-on regulator (not included)
- Python library makes it easy to get started using this board as a motor driver expansion board
- GPIO pin mappings can be customized if the default mappings are not convenient
- Reverse-voltage protection on motor power supply
- Under-voltage lockout and protection against over-current and over-temperature
Assembly with included hardware
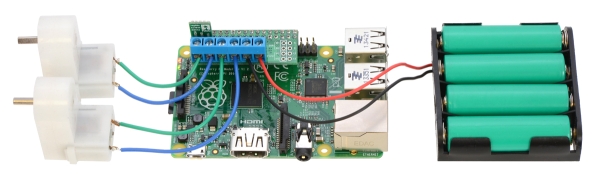
Before the motor driver board can be plugged into your Raspberry Pi, female headers must be soldered into the appropriate holes. The kit ships with two 17-pin 0.1″ female headers that should be mounted to the bottom of the board (the side with surface-mount components). Once the kit is assembled, it should be plugged into the leftmost position on the Model B+’s GPIO header, leaving six pins exposed on the right, as shown in the picture below.
Three 2-pin, 5 mm terminal blocks are included for making easy motor and power connections to the board once they have been slid together and soldered to the six large through-holes. Alternatively, you can solder 0.1″ male header pins to the smaller through-holes above the terminal block holes, or you can just solder wires directly to the board.
Shorting blocks and 0.1″ male headers (not included) can be used to make some of the more advanced optional modifications to the board, such as remapping the control pins or paralleling the outputs.
Using the motor driver
In the board’s default state, the motor driver and Raspberry Pi are powered separately, though they share a common ground and the DRV8835 receives its logic supply voltage (VCC) from one of the Raspberry Pi’s 3V3 power pins. When used this way, the Raspberry Pi must be powered via its USB Micro-B receptacle, and the motor driver board must be supplied with 1.5 V to 11 V through its large VIN and GND pads. However, the motor driver board provides a set of three through-holes where you can conveniently connect an appropriate voltage regulator, allowing the motor supply to also power the Raspberry Pi (see the Powering the Raspberry Pi from the motor driver board section below)
By default, the driver is configured to operate in PHASE/ENABLE mode, in which a PWM signal applied to the ENABLE pin determines motor speed and the digital state of the PHASE pin determines direction of motor rotation. GPIO 12 and 5 are used to control the speed and direction, respectively, of motor 1, and GPIO 13 and 6 control the speed and direction of motor
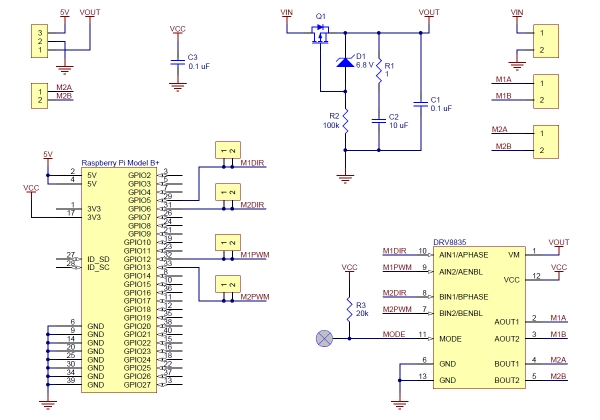 2. The table below shows how the inputs affect the outputs in this mode:
2. The table below shows how the inputs affect the outputs in this mode:
| Drive/brake operation in default PHASE/ENABLE mode | ||||
|---|---|---|---|---|
| xPHASE | xENABLE | MxA | MxB | operating mode |
| 1 | PWM | L | PWM | reverse/brake at speed PWM % |
| 0 | PWM | PWM | L | forward/brake at speed PWM % |
| X | 0 | L | L | brake low (outputs shorted to ground) |
PHASE/ENABLE mode should be suitable for most applications.
Configuring the board for IN/IN mode
The operating mode of the driver is controlled by the MODE pin, which the board pulls high to VCC through a 20 kΩ resistor to select PHASE/ENABLE mode by default. The pin labeled “MODE” can be driven low (or connected directly to ground) to switch the control interface to IN/IN, which allows for slightly more advanced control options as described in the table below:
| Drive/coast or drive/brake operation with MODE=0 (IN/IN) | ||||
|---|---|---|---|---|
| xIN1 | xIN2 | MxA | MxB | operating mode |
| 0 | 0 | OPEN | OPEN | coast (outputs off) |
| 0 | PWM | L | PWM | reverse/coast at speed PWM % |
| PWM | 0 | PWM | L | forward/coast at speed PWM % |
| PWM | 1 | L | PWM | reverse/brake at speed 100% − PWM % |
| 1 | PWM | PWM | L | forward/brake at speed 100% − PWM % |
| 1 | 1 | L | L | brake low (outputs shorted to ground) |
IN/IN mode is generally only useful if you only care about on/off control of the motors or if you can supply PWM signals to all four inputs. Since the Raspberry Pi Model B+ only has two hardware PWM outputs, additional work (such as setting up software PWM) is necessary to achieve speed control with IN/IN mode.
For morer detail: Pololu DRV8835 Dual Motor Driver Kit for Raspberry Pi B+