
Having recently received my Raspberry Pi, one of the first things I wanted to do was hook up a real-time clock chip I had lying around (a NXP PCF8563) and learn how to drive I2C from the BCM2835 hardware registers. Turns out it’s quite easy to do, and I think makes a useful project to learn with.
So, here are some notes I made getting it to work, initially with Chris Boot’s forked kernel that incorporates some I2C handling code created by Frank Buss into the kernel’s I2C bus driver framework.
After getting it to work with the kernel drivers, I created some C code to drive the RTC chip directly using the BCM2835 I2C registers, using mmap() to expose Peripheral IO space in the user’s (virtual) memory map, the technique I learned from Gert’s Gertboard demo software, though my code’s simpler (hopefully without limiting functionality!).
Note: Revision 2 boards require the code to access BSC1 (I2C1) rather than BSC0 (I2C0), so changes to the peripheral base address may be required, or in the case if the Linux I2C driver, a reference to i2c-1 rather than i2c-0. It should be simple enough, but I don’t want to write about things I haven’t done or tested, so a bit of extra work by the reader may be required.
The Circuit
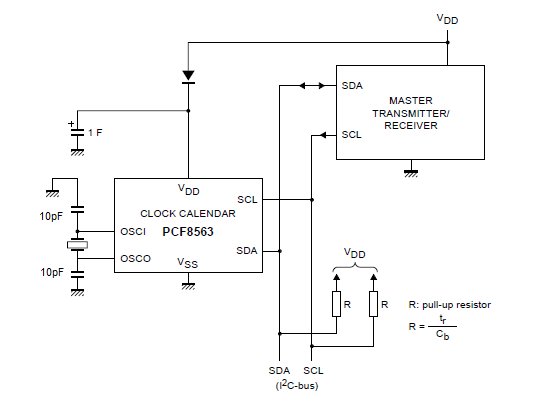
The PCF8563 datasheet’s reference schematic is all I used for the Raspi’s clock, though for the crystal I ditched the the trimmer capacitor from the datasheet’s schematic and used two 10pF caps as per datasheet – good enough for the stability that I’m likely to need.
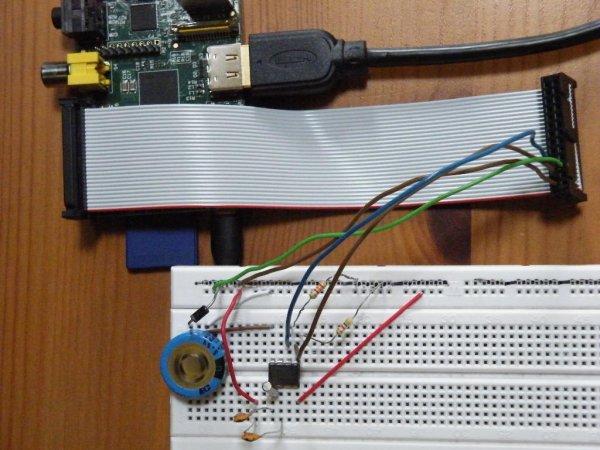
This translates to the following circuit on a breadboard. The large double-layer capacitor can be found easily at Maplin or Farnell, a 1F 5.5V, and while physically quite a bit larger than a CR2032 (or similar) battery, it should give months of power between charges. An electrolytic capacitor would also work for testing, but use a 150-300 ohm resistor in series to limit the current draw when charging, or your Raspi will likely reboot (since we’re only allowed to draw 50mA from the 3V3 pin).
The four wires hooked up to the Raspberry Pi’s expansion header are simply 3V3, GND, I2C0_SCL and I2C0_SDA (pins P1-01, P1-06, P1-05 and P1-03 respectively based on the Wiki reference).
Take care when wiring up the expansion header, since it’s easy to make mistakes when translating pins from diagram to board. It’s always worth at least checking voltage as reference points (e.g. measure +3.3V across what you think are pins 3V3 and GND) to make sure you’re not top to bottom on your translation, for example, before plugging up.
The circuit is so simple that it could just be wired together onto a 26-pin header connector, given a little care and forethought, and perhaps a bit of epoxy putty or similar to fix it all together.
The Kernel Driver
Next I had to think about software – it turned out that between Chris Boot and Frank Buss, there was already a kernel with support for the Raspi’s I2C bus in a way that the existing pcf8563 driver can use.
root@raspberrypi:~# modprobe i2c-dev
root@raspberrypi:~# modprobe rtc-pcf8563
root@raspberrypi:~# echo pcf8563 0x51 > /sys/class/i2c-adapter/i2c-0/new_device
When running Chris’s kernel, the above commands are all that are required to get the PCF8563 working with the hwclock command. The value 0×51 above is the hardwired I2C device address of the RTC chip.
And that’s it! Chris’s 3.2.18 kernel was screwing up my SD card access periodically (when it boots, it runs more or less flawlessly, but it often fails to boot) and ended up corrupting an otherwise good SD card image. I think this issue has been fixed since his 3.2.19 r3 build, but I haven’t tested it.
The C Code Alternative
My original intention had been to learn how to drive the Raspberry Pi’s IO Peripheral devices at a register level, so having seen that the circuit was wired and working using the kernel drivers, I went back to the Foundation’s official kernel, which has no inbuilt I2C support, to find out how to drive the chip in user-space.
After a quick attempt to access the IO peripheral space directly using pointers (ok, daft to even try, but you never know…), I had a look at the source code of Gert’s demo, which accesses GPIO among others, to see how it can be done.
Essentially, he accesses /dev/mem, which is a virtual file that makes available the physical address space (ARM Physical Addresses in the BCM2835 datasheet), via a chunk of user-space memory that’s judiciously allocated using malloc(), and that’s mapped to /dev/mem using the mmap().
I simplified this by allowing the kernel supply me with the virtual address of the physical address space, on the basis that it will automatically allocate on a page boundary. All the BCM2835 peripherals I’ve looked at in the datasheet are based at a 4K boundary.
If you’re used to driving I2C from a microcontroller, either bit-banging (driving the SCL and SDA pins directly with software) or with an MCU peripheral (through hardware registers), then you may find that the BCM2835 hardware does a little more for you than you’re used to. In particular, you use hardware registers to define the I2C device-address and the number of data-bytes (e.g. BSC0_A & BSC0_DLEN), and the BCM2835 handles the writing of the address, the bytes, and the corresponding acknowledge bits for you automatically.
It also provides a 16 byte FIFO buffer. You fill the buffer and it writes what you put into it. If you’re reading from a device, it buffers it in the FIFO for you to read. There’s very little low level stuff to do other than check if the buffer’s full/empty, and read/write the FIFO accordingly. In the example below, I don’t even need to monitor the buffer’s status, since no transaction exceeds the FIFOs 16 bytes.
Below is the C source of my code used to drive the RTC directly from user-space using the BMC peripheral registers. It allows reading and displaying of the RTC chip time, setting the RTC from the system clock, and setting the system clock from the RTC. All times are handled as UTC. The code also configures GPIO pins 0 and 1 as ALT0 (SDA and SCL for BMC0), since they’re not routed to the I2C peripheral by default.
Everything is written for clarity rather than elegance, and it’s all in a single file for the same reason (it’s not a big program).
/*
* pcf8563_i2c_rtc.c - example of accessing a PCF8563 via the BSC0 (I2C) peripheral on a BCM2835 (Raspberry Pi)
*
* Copyright 2012 Kevin Sangeelee.
* Released as GPLv2, see <http://www.gnu.org/licenses/>
*
* This is intended as an example of using Raspberry Pi hardware registers to drive an RTC chip. Use at your own risk or
* not at all. As far as possible, I've omitted anything that doesn't relate to the RTC or the Raspi registers. There are more
* conventional ways of doing this using kernel drivers, though they're harder to follow what's happening in hardware.
*/
#include <stdio.h>
#include <time.h>
#include <fcntl.h>
#include <sys/mman.h>
#define IOBASE 0x20000000
#define BSC0_BASE (IOBASE + 0x205000)
#define GPIO_BASE (IOBASE + 0x200000)
#define BSC0_C *(bsc0.addr + 0x00)
#define BSC0_S *(bsc0.addr + 0x01)
#define BSC0_DLEN *(bsc0.addr + 0x02)
#define BSC0_A *(bsc0.addr + 0x03)
#define BSC0_FIFO *(bsc0.addr + 0x04)
#define BSC_C_I2CEN (1 << 15)
#define BSC_C_INTR (1 << 10)
#define BSC_C_INTT (1 << 9)
#define BSC_C_INTD (1 << 8)
#define BSC_C_ST (1 << 7)
#define BSC_C_CLEAR (1 << 4)
#define BSC_C_READ 1
#define START_READ BSC_C_I2CEN|BSC_C_ST|BSC_C_CLEAR|BSC_C_READ
#define START_WRITE BSC_C_I2CEN|BSC_C_ST
#define BSC_S_CLKT (1 << 9)
#define BSC_S_ERR (1 << 8)
#define BSC_S_RXF (1 << 7)
#define BSC_S_TXE (1 << 6)
#define BSC_S_RXD (1 << 5)
#define BSC_S_TXD (1 << 4)
#define BSC_S_RXR (1 << 3)
#define BSC_S_TXW (1 << 2)
#define BSC_S_DONE (1 << 1)
#define BSC_S_TA 1
#define CLEAR_STATUS BSC_S_CLKT|BSC_S_ERR|BSC_S_DONE
#define PAGESIZE 4096
#define BLOCK_SIZE 4096
struct bcm2835_peripheral {
unsigned long addr_p;
int mem_fd;
void *map;
volatile unsigned int *addr;
};
struct bcm2835_peripheral gpio = {GPIO_BASE};
struct bcm2835_peripheral bsc0 = {BSC0_BASE};
// Some forward declarations...
void dump_bsc_status();
int map_peripheral(struct bcm2835_peripheral *p);
void unmap_peripheral(struct bcm2835_peripheral *p);
int systohc = 0;
int hctosys = 0;
struct tm t;
time_t now;
// BCD helper functions only apply to BCD 0-99 (one byte) values
unsigned int bcdtod(unsigned int bcd) {
return ((bcd & 0xf0) >> 4) * 10 + (bcd & 0x0f);
}
unsigned int dtobcd(unsigned int d) {
return ((d / 10) << 4) + (d % 10);
}
// Function to wait for the I2C transaction to complete
void wait_i2c_done() {
//Wait till done, let's use a timeout just in case
int timeout = 50;
while((!((BSC0_S) & BSC_S_DONE)) && --timeout) {
usleep(1000);
}
if(timeout == 0)
printf("wait_i2c_done() timeout. Something went wrong.\n");
}
////////////////
// main()
////////////////
int main(int argc, char *argv[]) {
if(argc == 2) {
if(!strcmp(argv[1], "-w"))
systohc = 1;
if(!strcmp(argv[1], "-s"))
hctosys = 1;
}
if(map_peripheral(&gpio) == -1) {
printf("Failed to map the physical GPIO registers into the virtual memory space.\n");
return -1;
}
if(map_peripheral(&bsc0) == -1) {
printf("Failed to map the physical BSC0 (I2C) registers into the virtual memory space.\n");
return -1;
}
/* BSC0 is on GPIO 0 & 1 */
*gpio.addr &= ~0x3f; // Mask out bits 0-5 of FSEL0 (i.e. force to zero)
*gpio.addr |= 0x24; // Set bits 0-5 of FSEL0 to binary '100100'
// I2C Device Address 0x51 (hardwired into the RTC chip)
BSC0_A = 0x51;
if(systohc) {
printf("Setting RTC from system clock\n");
now = time(NULL);
gmtime_r(&now, &t); // explode time_t (now) into an struct tm
//////
// Write Operation to set the time (writing 15 of the 16 RTC registers to
// also reset status, alarm, and timer settings).
//////
BSC0_DLEN = 16;
BSC0_FIFO = 0; // Addr 0
BSC0_FIFO = 0; // control1
BSC0_FIFO = 0; // control2
BSC0_FIFO = dtobcd(t.tm_sec); // seconds
BSC0_FIFO = dtobcd(t.tm_min); // mins
BSC0_FIFO = dtobcd(t.tm_hour); // hours
BSC0_FIFO = dtobcd(t.tm_mday); // days
BSC0_FIFO = dtobcd(t.tm_wday); // weekdays (sun 0)
BSC0_FIFO = dtobcd(t.tm_mon + 1); // months 0-11 --> 1-12
BSC0_FIFO = dtobcd(t.tm_year - 100); // years
BSC0_FIFO = 0x0; // alarm min
BSC0_FIFO = 0x0; // alarm hour
BSC0_FIFO = 0x0; // alarm day
BSC0_FIFO = 0x0; // alarm weekday
BSC0_FIFO = 0x0; // CLKOUT control
BSC0_FIFO = 0x0; // timer control
BSC0_S = CLEAR_STATUS; // Reset status bits (see #define)
BSC0_C = START_WRITE; // Start Write (see #define)
wait_i2c_done();
}
//////
// Write operation to restart the PCF8563 register at index 2 ('secs' field)
//////
BSC0_DLEN = 1; // one byte
BSC0_FIFO = 2; // value 2
BSC0_S = CLEAR_STATUS; // Reset status bits (see #define)
BSC0_C = START_WRITE; // Start Write (see #define)
wait_i2c_done();
//////
// Start Read of RTC chip's time
//////
BSC0_DLEN = 7;
BSC0_S = CLEAR_STATUS; // Reset status bits (see #define)
BSC0_C = START_READ; // Start Read after clearing FIFO (see #define)
wait_i2c_done();
// Store the values read in the tm structure, after masking unimplemented bits.
t.tm_sec = bcdtod(BSC0_FIFO & 0x7f);
t.tm_min = bcdtod(BSC0_FIFO & 0x7f);
t.tm_hour = bcdtod(BSC0_FIFO & 0x3f);
t.tm_mday = bcdtod(BSC0_FIFO & 0x3f);
t.tm_wday = bcdtod(BSC0_FIFO & 0x07);
t.tm_mon = bcdtod(BSC0_FIFO & 0x1f) - 1; // 1-12 --> 0-11
t.tm_year = bcdtod(BSC0_FIFO) + 100;
printf("%02d:%02d:%02d %02d/%02d/%02d (UTC on PCF8563)\n",
t.tm_hour,t.tm_min,t.tm_sec,
t.tm_mday,t.tm_mon + 1,t.tm_year - 100);
if(hctosys) {
printf("Setting system clock from RTC\n");
now = timegm(&t);
stime(&now);
}
unmap_peripheral(&gpio);
unmap_peripheral(&bsc0);
// Done!
}
// Exposes the physical address defined in the passed structure using mmap on /dev/mem
int map_peripheral(struct bcm2835_peripheral *p)
{
// Open /dev/mem
if ((p->mem_fd = open("/dev/mem", O_RDWR|O_SYNC) ) < 0) {
printf("Failed to open /dev/mem, try checking permissions.\n");
return -1;
}
p->map = mmap(
NULL,
BLOCK_SIZE,
PROT_READ|PROT_WRITE,
MAP_SHARED,
p->mem_fd, // File descriptor to physical memory virtual file '/dev/mem'
p->addr_p // Address in physical map that we want this memory block to expose
);
if (p->map == MAP_FAILED) {
perror("mmap");
return -1;
}
p->addr = (volatile unsigned int *)p->map;
return 0;
}
void unmap_peripheral(struct bcm2835_peripheral *p) {
munmap(p->map, BLOCK_SIZE);
close(p->mem_fd);
}
void dump_bsc_status() {
unsigned int s = BSC0_S;
printf("BSC0_S: ERR=%d RXF=%d TXE=%d RXD=%d TXD=%d RXR=%d TXW=%d DONE=%d TA=%d\n",
(s & BSC_S_ERR) != 0,
(s & BSC_S_RXF) != 0,
(s & BSC_S_TXE) != 0,
(s & BSC_S_RXD) != 0,
(s & BSC_S_TXD) != 0,
(s & BSC_S_RXR) != 0,
(s & BSC_S_TXW) != 0,
(s & BSC_S_DONE) != 0,
(s & BSC_S_TA) != 0 );
}
The code is all in one file for clarity, and can be compiled and run with: –
root@pi:~# gcc -o pcf8563_i2c_rtc pcf8563_i2c_rtc.c root@pi:~# ./pcf8563_i2c_rtc 19:12:32 14/05/12 (UTC on PCF8563)
Parameters ‘-w’ and ‘-s’ are the same as those in hwclock – e.g. write hardware clock from system time, and set system time from hardware clock.