
- Introduction
As technology advances, image processing is being used in numerous applications especially
within robotics. Examples of image processing can be found in autonomous vehicles and
commercial robots. The Robogames Competition held in San Mateo, California challenges
students to use new technologies to design a robot hockey player capable of passing and
shooting a puck as well as maneuvering across a hockey arena. ROObockey is inspired by the
current competitions but the design includes a more accurate and intelligent shooting
mechanism.
- Problem Statement
2.1. Need
A game of hockey consists of multiple challenges, including the ability to accurately pass a
puck to another player or shoot a puck into the goal. Hockey robots currently rely on
human control to determine the target and pass the puck accordingly. A sensing system
used to precisely locate the position of another player would eliminate human error in
passing the puck. This sensing system could be expanded in the future to multiple robots
to create a robot hockey team with intelligent passing and shooting capabilities.
2.2. Objective
The objective of ROObockey is to design and build a hockey robot capable of accurately
shooting a puck at a goal target. Stationary objects will be used as target beacons for
shooting the puck. The robot will be wirelessly controlled for manual operation. It will also
receive a shooting command from the user.
2.3. Background (Research Survey)
2.3.1. Overview
The main idea of the project is to design a robot that can implement softwareassisted shooting of a hockey puck. The approach to this task is to use image
processing of various shapes and colors to distinguish between the different
targets. The camera used for supplying the input to the image processing system
could use a lens that can provide a wider field of view. [3] An electromechanical
shooting mechanism will be used to pass and launch the puck to the user-defined
targets.
2.3.2. Relevant Technologies
At the present time, hockey robot patents pertain to humanoid robots that
simulate a full scale, typical ice hockey game. An idea of the patent holder was to
suspend full-scale controllable robot hockey players from the ceiling and to control
them from a remote location. Another patent idea consists of using a rotary motor
hockey puck launcher. There are no patents held for hockey robots used with
wireless controlled applications. [1][2]
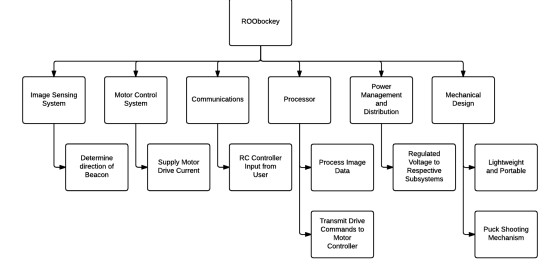
2.4.Objective Tree
- Design Requirements Specification
The ROObockey robot consists of multiple sensor inputs. The system will require battery power
to operate. The system will receive wireless control input, interpret the control and image
data, and then operate the motors.
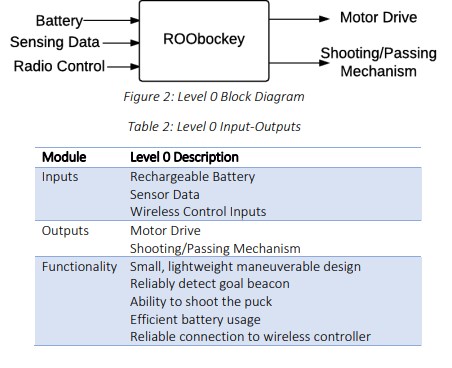
3.1. Engineering and Marketing Requirements

The following is a simple Level 0 block diagram of the entire system.
4.2. Level 1
4.2.1. Hardware
The hockey robot will be battery powered allowing for untethered operation. The
battery will be at a higher voltage than what the sensors, wireless controller, and
processor can require. A voltage regulator will be used to safely power the devices.
The power management and distribution system will provide the step-up and stepdown voltages required for the system to operate.
Wireless controller input will allow the user to control the robot. The
communication device will control the maneuvering of the robot and shooting
command.
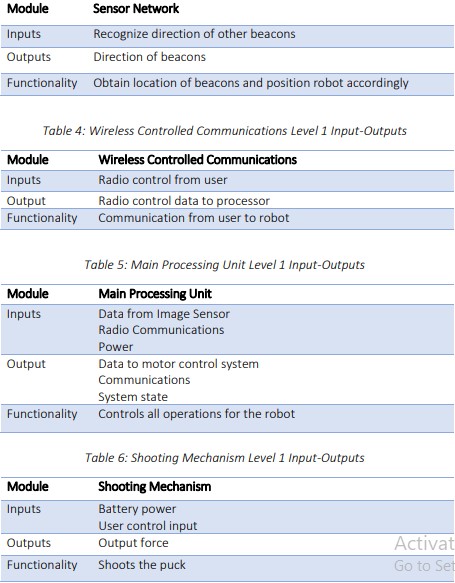
The sensor network will consist of a camera to locate a beacon and a sensor to
determine whether the robot currently has the puck. The sensor data is all sent to
the processor where all the needed calculations can be processed.
The main processor unit will handle signal and data processing coming from the
sensor network and wireless controller input. It will also be in charge of controlling
the motor control system and shooting mechanism.
The motor control system will drive the DC motors. This is a switch between the
battery and the motors, controlling the speed and direction of rotation for the
motors.
The shooting mechanism will consist of a device capable of projecting the hockey
puck forward. It receives the release command from the processor.
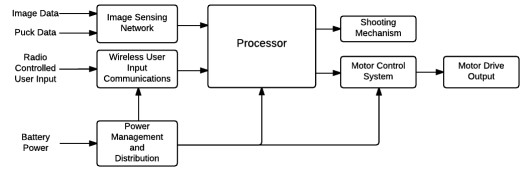
The Hardware Level 1 block diagram shown in Figure 3 below consists of each of
these systems along with the corresponding inputs and outputs throughout the
system.
4.2.2. Software
The design incorporates color and shape recognition image processing to locate
the beacon the user wishes to pass and shoot the puck towards. The software
receives the camera input, processes the images while searching for the beacon,
and then makes a decision on how to direct the motors. The PWM leaving the
processor will tell the motors how fast to spin the motors by varying the duty cycle.
An overview of the software process flow is shown below in Figure 4, the Software
Level 1 block diagram. It incorporates the camera input, shape and color detection,
and algorithm to move the motors.
Source: ROObockey: Remote Controlled, Aim-Assisted Street Hockey Robot