
SparkFun has created several Real-Time Kinematics (RTK) as well as dead reckoning boards in the past, but this new ZED-F9R GPS piHAT from the Colorado-based manufacturer is the very first high-precision sensor fusion board to combine both the RTK and dead reckoning features in one professional platform.
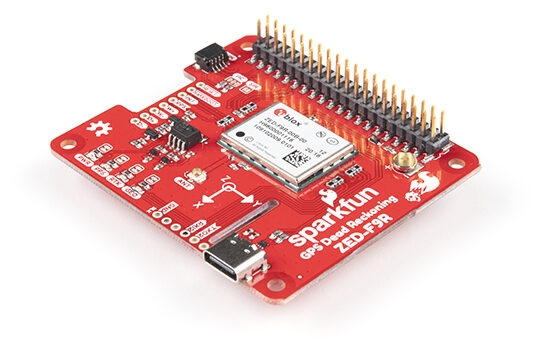
The Raspberry Pi add-on board with impressive configuration options takes advantage of u-blox’s automotive dead reckoning technology to provide highly accurate and continuous positioning for automotive and other unmanned vehicle applications including vehicle tracking. The pHAT features u-blox’s 184-channel ZED-F9R GPS receiver module for ADR which supports concurrent reception of four GNSS systems with 20cm accuracy when connected to an RTK base station. The combination of the integrated 3D sensor measurements on the ZED-F9R and the GNSS is responsible for the up to 30Hz real-time positioning rate being delivered.
The ZED-F9R GPS pHAT is touted as an ideal solution for autonomous robotic applications that demand position accuracy under challenging situations. The pHAT can maximize accurate positioning in dense or covered areas as well as provide continuous positioning for areas with poor signal conditions or complete signal loss like short tunnels and parking garages.
SparkFun’s announcement for this $250 ZED-F9R GPR-RTK dead reckoning pHAT was made alongside a similar $290 open source GPS-RTK dead reckoning breakout model with the same high precision sensor GPS board but without RPi compatibility. “By default, we chose to use the Raspberry Pi’s serial UART to communicate with the module. With pre-soldered headers, no soldering is required to stack the pHAT on a Raspberry Pi, NVIDIA Jetson Nano, Google Coral, or any single-board computer with the 2 x 20 form factor. To give more connection flexibility, the board also breaks out a few 0.1 spaced pins from the u-blox receiver and a Qwiic connector is also added to facilitate connections between the board and Qwiic enabled devices.
Read more: SPARKFUN LAUNCHES A HIGH-PRECISION DEAD RECKONING GPS/GNSS BOARD WITH RTK SUPPORT