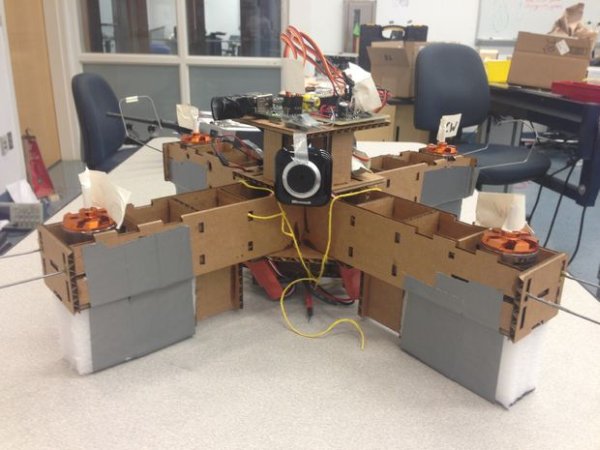
Autonomous Quadcopter Platform
Hardware Setup WARNING: Experience with flying Remotely Controlled QuadCopter is required. Binding Procedure Binding is required the first time the craft is used with a new transmitter. It is doneusing the following procedure. To place Rx into binding mode, pace a wire jumper across PCB board “Term 8” Pins 1& 4. This will force the […]
Autonomous Quadcopter Platform Read More »