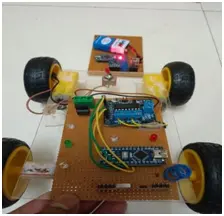
The Object Finding and Obstacle Avoidance Robot: A Step Towards Intelligent Machines
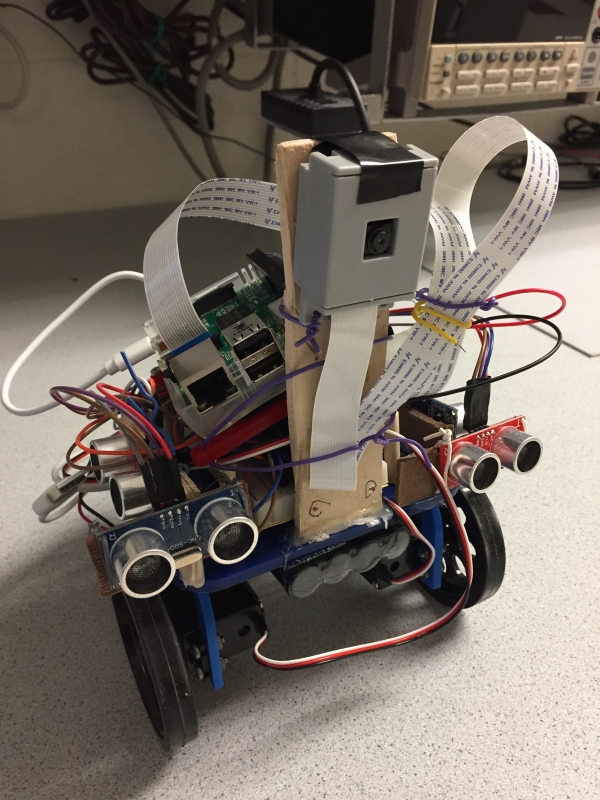
This little helper can autonomously search for objects you specify based on their unique RGB color patterns. It then navigates its environment, closing the distance until it reaches a designated stop point, just 10 centimeters from the target. But that’s not all! While on its mission, the robot expertly avoids any obstacles in its path, […]
The Object Finding and Obstacle Avoidance Robot: A Step Towards Intelligent Machines Read More »