
Emergency services First On Scene Drone for collecting vital information prior to arrival of response team

INTRODUCTION
Please take note this is an on going build so it is updated daily, Please come back often to view the new information that i regularly add. I will do a final conclusion with all information and diagrams at the end, it will basically be a package with everything you need to copy this build
How many times have a fireman, or an ambulance or even the police gotten to the scene of a crime or been called on an emergency only to find that they are to late, I have been thinking about this for a long time, what if we can utilize a drone with all the correct sensors and materials to be able to be deployed the second an emergency call comes in, there will be no need for the drone to jump into a fire suit or drive a cop car through traffic so it will be able to get to the scene much faster, at the drones arrival it can canvas and scan the area and upload a 3D mapped environment scan of the scene, photograph potential suspects running away or go into a burning building while calculating the amount of survivors while sending there vital signs directly to the station or hospitals computer or even the responding officers car so that they can jump right into action the second they get there without hesitation, How many earth quakes and land slides has buried our loved ones, a group of drones working in unison like the collective mind of a bee hive can track people buried under deb-re and even fly into small spaces to find the or delver small glucose packs or maybe even shoot down a criminal with a stun-gun before he gets a chance to pull the trigger or get away from the bank, giving the police time to get there and arrest him… what if… I have lost people before and if you have not i can tell you know if only the ambulance got there faster…
Tools
The tools section is very crude so i have added a list of everything i needed for this project,
Dremmel with various bits
Hand Drill
screwdrivers Flat and phillips
Spanners 7 & 5.5mm
diamond file set
Heatgun
Soldering Iron
Stanley knife
Miscellaneous parts..
various coloured silicone wire .22AWG
male & female header pins
LED's
Super glue
Solder
Double sided PCB
The Basic Idea
This system can be used with a normal 2.4G R/C controlling system just by adding an R/C receiver to the Flight controller board. The original idea is that a link is established from any PC running the Hologram nova board that connects with the Raspberry Pi Zero wireless that is on the drone, Multiple ultrasonic sensors can map the surrounding area that the drone flies in and the use of the wave share NEO6 GPS module can pin point the location of the drone and also be given instructions as to where it should fly, The Thermal imaging camera and gas detection sensors will look for any dangerous environment surroundings and also track people stuck in the fire or debree from a rock slide, I am trying to find an option for a heart rate monitor that can work over a set distance wireless in order to scan for heart beats if the people that is in trouble is stuck. The drone can be controlled from a head office or set out automatically in a distress call. By doing this a lot of vital information can be sent back to the head office and the response team can know how many people are in danger and what their condition is as well as the dangers of the surrounding areas, thus better preparing them for their arrival on the scene. The Raspberry Pi handles all the collected information and decides what should be done with it, The arduino Mega is purely the Flight Controller to control all the sensors and motors for flight. There is also a “Black Box” that collects the same data that is sent wireless but it is collected on a micro Sim Card for in case the drone crashes or is badly damaged in order to review what went wrong. Their is a small Nokia 5110 LCD on board of the drone that can give vitals and statistics of anything it collects with its sensors, The drone operator can also use this LCD to communicate with a victim and give them instructions like telling them help is on the way, By doing this i thought it might also be a good idea to include a wireless two way communication system so that the injured person is able to talk to the drone operator at head office if necessary. The power system to make all of this work will be a rather powerful Li-polymer battery pack but i am still busy designing it and i t will only be added much later in the project. For now i am adding the flight controller schematics with the LCD and all the sensors connected, This should help start of the project as this is also probable the most important part of the drone other than the wireless connection with the Hologram Nova.
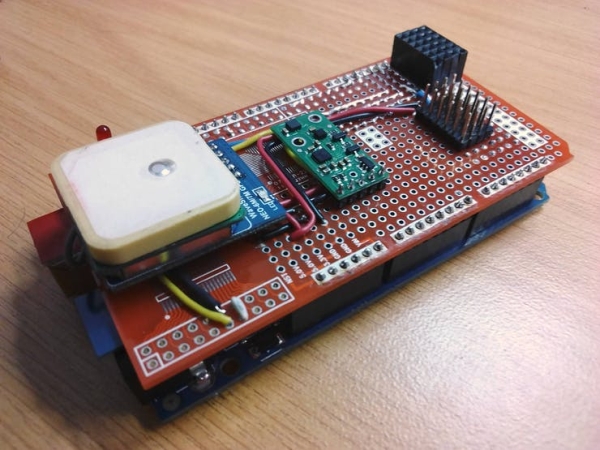
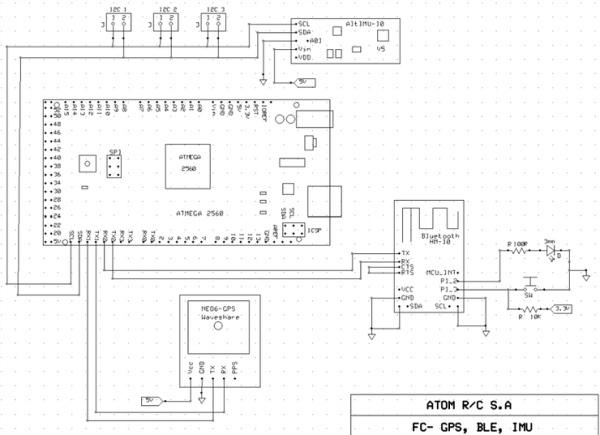
FLIGHT CONTROLLER
The flight controller is based on an Arduino Mega 2560 R3, it also makes use of a Wave share Neo6/7m GPS, there is 3 SR-HC04 Ultrasonic sensors, one VTX53 Laser sensors for the front of the drone, an additional DHT-11 temperature sensor to test ambient temperature and Humidity, a normal 12v Buzzer for alarms, a Nokia 5110 LCD, ( i have decided to change the LCD to a OLED 128×64 Display for the reason the original multiwii software was based on a OLED display and not on the 5110 so it will be easier to incorporate the OLED instead of trying to re-write the graffix for the 5110 LCD) And last but not least for the IMU i decided to use the new POLOLU altIMU-10 V5, this is an awesome sensor that incorporates an LSM6DS33 Accelerometer and Gyro combination, along with a LIS3MDL Magnetometer and a LPS25H digital Barometer. with this combination of sensors on one board it helps with the limited space requirements and makes communication over I2C very easy, The board also comes in at a very low price of only R250 South African Rand's and that is very cheap. It is a very good Quality sensor from Pololu but is not yet supported by Multi Wii, i will write the necessary data in Arduino IDE to add these new sensors to Multi Wii so it can be used within the flight controller. In addition to all of this sensors i am also adding a camera system taken out of a Wii Controller that can track up to four different objects at the same time, and then a secondary Cmos camera operating over 5.8G waveband. I will add a high power LED with Driver that will be attached to the view camera gimbals to act ass a powerful spotlight, RGB LED's will be attached underneath the drone to light it up with emergency response colors of choice like red or blue flashes. I have also added a HM-10 Bluetooth module, this module will operate appart from the rest of the unit and be programmed to use sensor information to seprately pinpoint the location of the drone, it will have a small back up power source that will only work for the BLE if there is any problems with the drone where it crashes or gets lost it can be tracked by activating the BLE beacon and using the last known location from the GPS, It is basicaly a secondary back up solution to protect the drone seeing that it might end up very expensive to build…
POWER DISTRIBUTION BOARD
Now with the FC completed i needed to build a power distribution board to power the 4 ESC's for the motors, Also i am using 4 7.4V li-polymer batteries with a 4000mAh capacity each the 4 batteries are connected in a 2S2P setting giving me 14.8V and 8000mAh, Each battery has an individual voltage divider to monitor each 7.4V pack and the i used a pololu Current sensor that monitors current flow over the entire 2S2P connection.
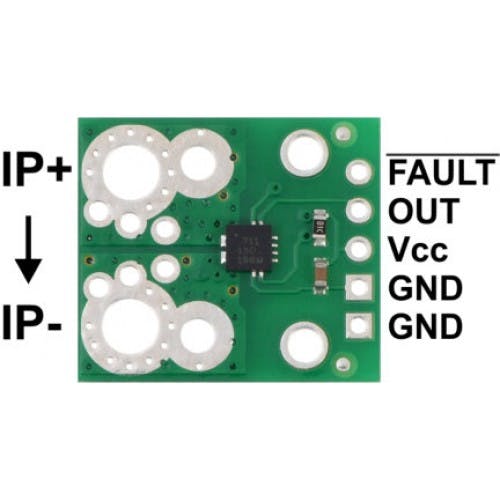
The current sensor that i used is a POLOLU ACS714 that is a hall effect based linear current sensor, for the voltage divider i used 2 resistors in series connecting the first leg to positive and the third leg to ground then where the two resistors join i added a connection to an analog pin of the micro controller, this analog pin will measure the voltage on the arduino, i used 2K2 resistors but u can calculate your own voltage dividers to work with the battery that you decide to use if you build this drone.If you need help calculating your resistor values and setting up your algorithm for your measurement you can mention it in the comments section with the type of battery you are using and i will help you out.