
Main functions:
- Control the four rotators using the light buttons,
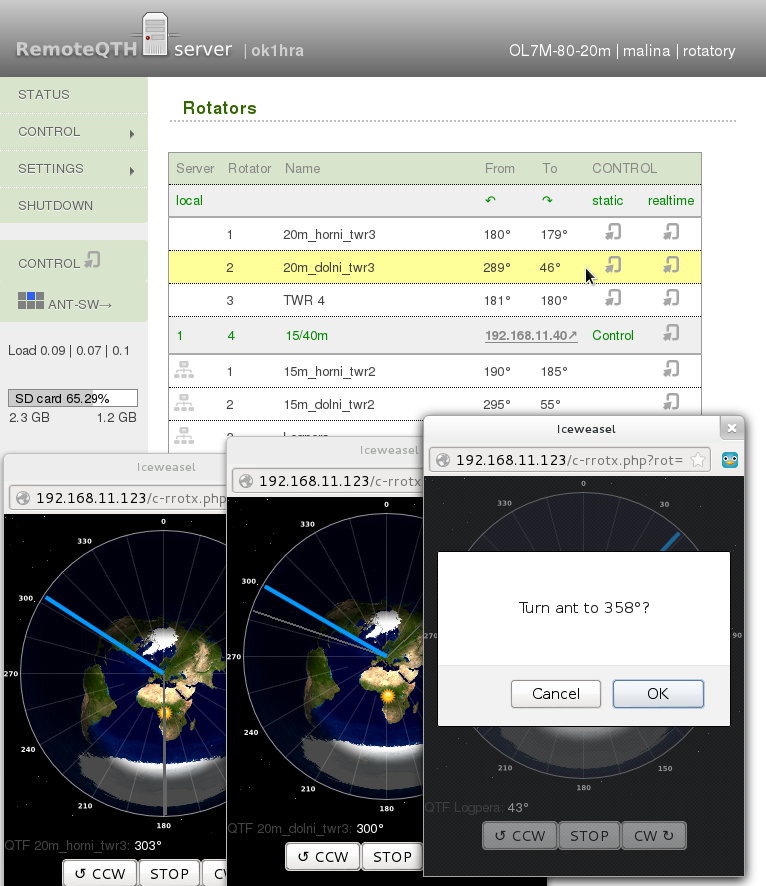
rotary encoder and with a two-line display for each rotor. - Same control remoted via web interface or telnet
– only click to map and confirm rotating.
- Rotator module can directly control the motor of the rotator
- DC version of the phase-change
- AC version switching CW or CCW winding
Or you use the relay contacts to control your control box.

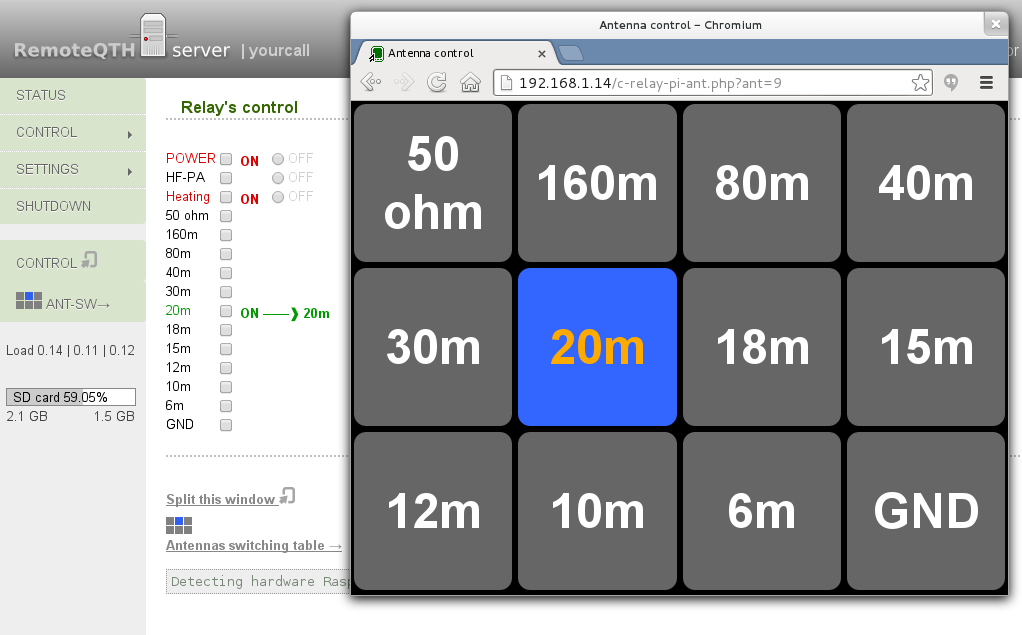
- 24 freely configurable relay (15 in model B) (first used for server power on/off)
as single pole, single throw or single pole, more throw
– suitable for switching antennas. - GPIO interface power board associating functions
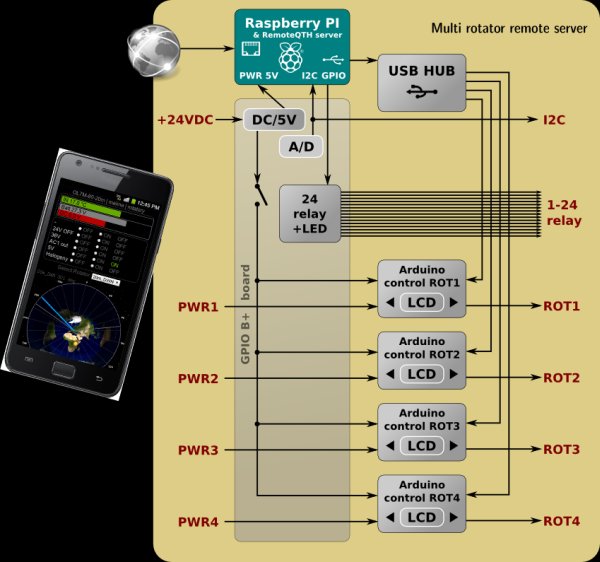
- Relay switching from GPIO
- DC/DC converters power supply 5V for Raspberry PI
- DC/DC converters power supply 5V for four arduino rotators module.
Turns ON the first GPIO output. - Available four DC/DC converters – custom voltage power supply for each motor of rotator. In the range of 2 to 37V an max current 3A.
- Include A/D converter for four voltage measurement
- Expand I2C bus – available connect next temperature or voltage sensors
- Relay switching from GPIO
- All in simple 2U Rack case.
- Case made to measure from 2 mm aluminium.
- Laser engraving plastic front panel.
- Each the rotator unit interface, based on arduino (code by K3NG) contains:
- LCD.
- Lighting button (CW, CCW, Start).
- Preset encoder.
- Three relay (CW, CCW and Brake).
- Arduino nano module.
- Ready for AC and DC rotators.
- Analog input.
- 5V power voltage.
- Server requires a DC power supply ranging from 9 to 40 volts.
Voltage is dependent to the rotator, if we are powered motor directly from the server. - If you have a rotator AC motor, the server has terminals
for connecting the AC voltage for each rotor separately. - Another server utilization


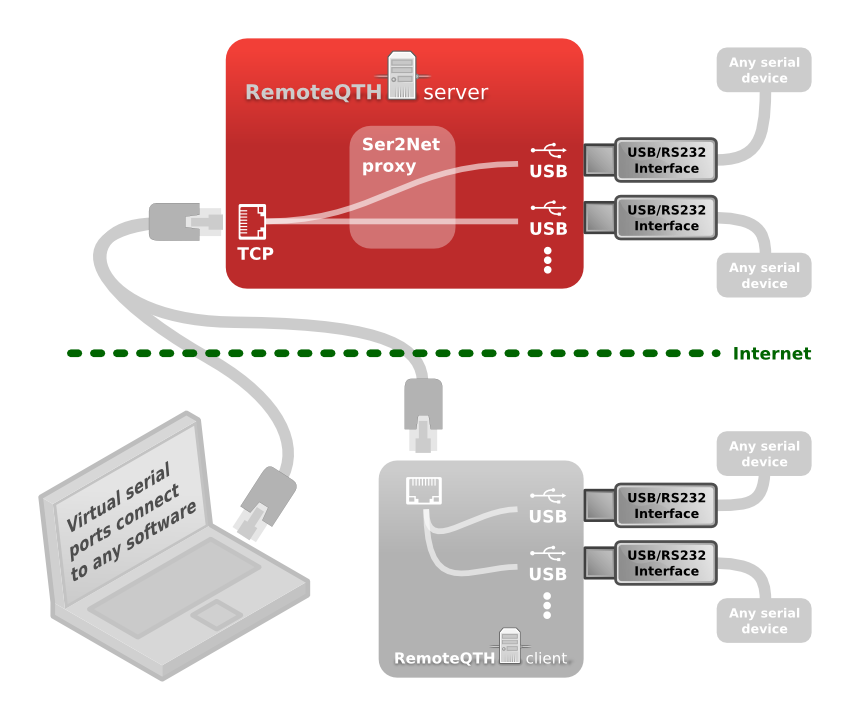
- Export USB/serial interface to IP.
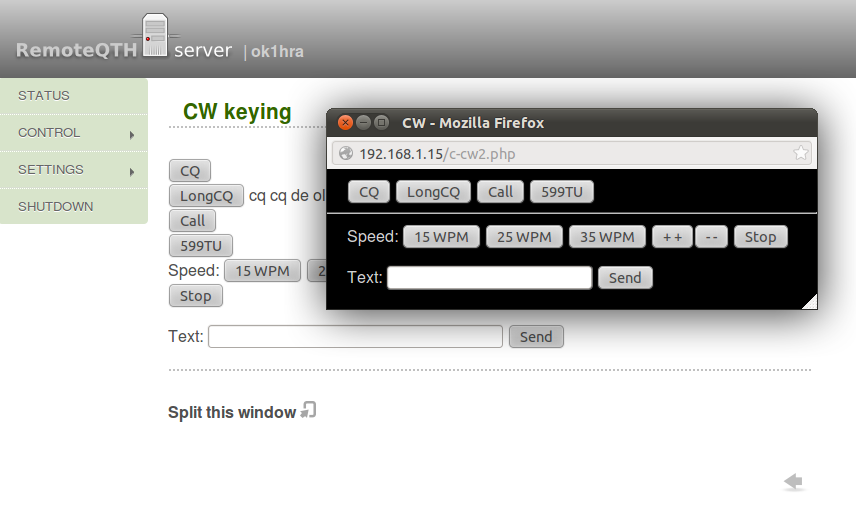
- CW keying from web interface.
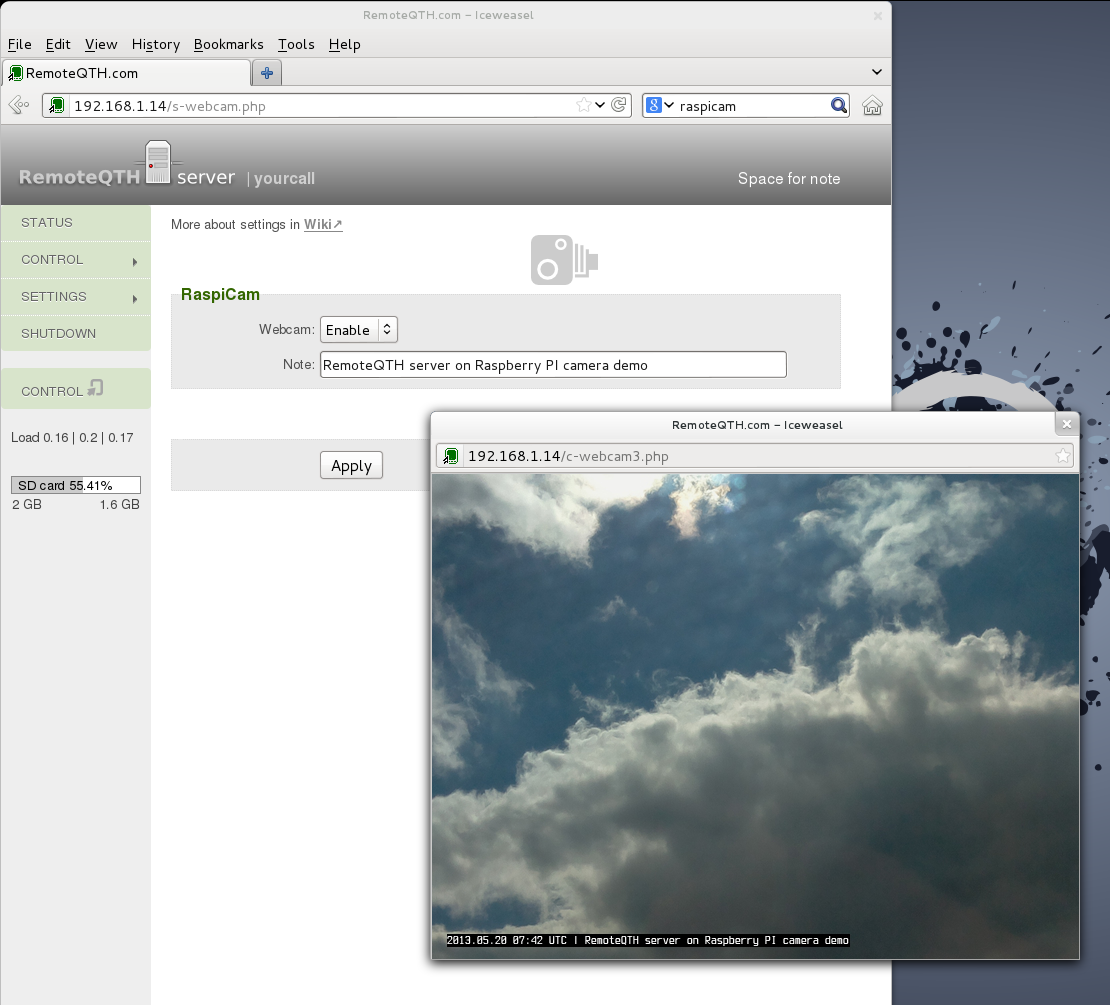
- Connection RaspiCam Webcam.
- Access without public IP adress (n2n vpn).
- Switching relay by TRX frequency using Band decoder function.
- CW keying from web interface.
- Necessary components
- Rack case.
- Rapsberry PI + 4GB SD card with RemoteQTH server.
- GPIO interface power board.
- Relay board.
- Four arduino rotator interface.
- Usb hub with external power supply.
- DC power supply 9-40V dependency to max DC rotator voltage.
- AC power supply if AC rotator instaled.



For more detail: Web control four rotator, fifteen relays and many other features that come from Raspberry PI RemoteQTH server.