
Well, I received, setup my StereoPi Crowd Supply Kit, now to make it mobile using common components.
What Do I Build Next? It's been awhile since I last published any project. I have started many projects and experimented with the Nvidia Jetson Nano, the Atomic Pi and even the Raspberry Pi 4 with 4gb. I make most of my purchases from Amazon, and back projects on Kickstarter, Indiegogo, and CrowdSupply.
Last Christmas, 2018, I published a Sony Spresence based robot:
https://www.hackster.io/alien-energy-3/what-do-i-build-next-a-sony-spresense-robot-63f955
so this Christmas, 2019:
I looked and purchased a few Donkeycar style kits for artificial driving abilities for the RPi 4 ( https://www.amazon.com/XiaoR-Geek-Starter-Platform-Raspberry/dp/B07VBQKZB2/ref=sr_1_1_sspa?keywords=donkey+car&qid=1573602339&sr=8-1-spons&psc=1&spLa=ZW5jcnlwdGVkUXVhbGlmaWVyPUEyT1pPSEZBQVhIVTBFJmVuY3J5cHRlZElkPUEwNTM4ODk5M1I2VjRESUJUTUlRRSZlbmNyeXB0ZWRBZElkPUEwNDUxMDE1Mk1JOTBHQzJDREEySCZ3aWRnZXROYW1lPXNwX2F0ZiZhY3Rpb249Y2xpY2tSZWRpcmVjdCZkb05vdExvZ0NsaWNrPXRydWU= ) and Jetson Nano ( https://www.amazon.com/XiaoR-Geek-Starter-Driving-Platform/dp/B07TZ449VP/ref=sr_1_1?keywords=donkey+car&qid=1573602302&sr=8-1 ); and FPV video streaming builds based upon Kookye/Osoyoo/Adeept kits and knowledge. I looked into Arduberry's Arducam ( https://www.amazon.com/gp/product/B01ESRYA2Y/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1 ) and Arducam ( https://www.amazon.com/gp/product/B012UXNDOY/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1 ), Google's Vision, and Pixy2 pan-n-tilt assembly ( https://www.amazon.com/gp/product/B07D1CWJTV/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1 ) and Pixy2 ( https://www.amazon.com/Charmed-Labs-Pixy2-Vision-Sensor/dp/B07D1CLYD2/ref=pd_bxgy_img_2/147-6700668-9160725?_encoding=UTF8&pd_rd_i=B07D1CLYD2&pd_rd_r=6ac42d3c-1254-43ee-aa04-457cce61204e&pd_rd_w=GadDU&pd_rd_wg=lSHft&pf_rd_p=09627863-9889-4290-b90a-5e9f86682449&pf_rd_r=YTS045WR3D60FHGBKCX7&psc=1&refRID=YTS045WR3D60FHGBKCX7 ).
Please don't be alarmed by the above links, ultimately I used/reverted to simple and common hardware and reused some Raspberry Pi video streaming and python code for the DC motor control.
I had wanted to add the StereoPi assembly onto my last “What Do I Build Net?” project, but that “Frankenstein Build” already had too many individual software interfaces involved…. I was going to place this onto the Robot claw for “fine positioning”
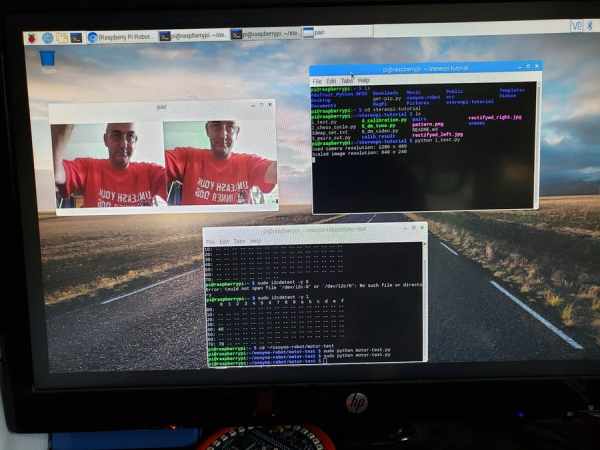
First I assembled, configured and tested the various StereoPi software packages, in hopes to incorporate Robot Stereo Vision. I followed Wiki, posts and forum info from:
https://wiki.stereopi.com/index.php?title=Main_Page#StereoPi_Wiki_Main_Page
Here are pictures from the StereoPi build process: 1st unpacking
Here are pictures from the StereoPi build process: 2nd assembly and test
Here is my “camera determination video”