Updated April 2015
I have made this because I have found no projects using the PiFace.
Forum topic at www.raspberrypi.org:
http://www.raspberrypi.org/phpBB3/viewtopic.php?f=37&t=54314&p=413902
Here is a simple project that only needs a Raspberry Pi, PiFace, Python, jumper wires, and a stepper motor – that’s it!
Step 1: Schematic
Step 2: Connect the PiFace to the Raspberry Pi
Put the PiFace breakout board onto the GPIO connectors pf the Raspberry Pi.
Simple 😉
Step 3:
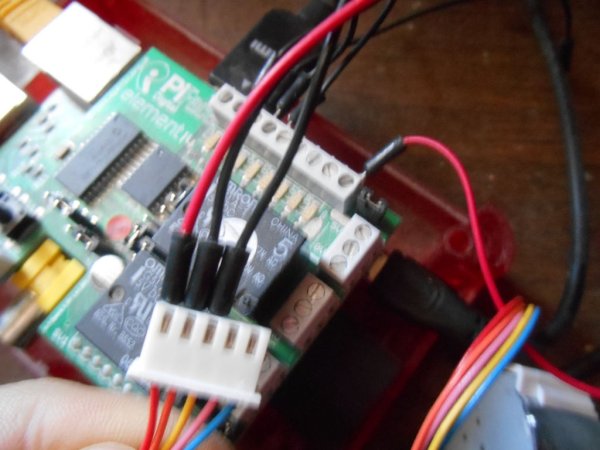
First connect a jumper wire from ‘ 5 v’ to red wire on motor.
Step 4:
Second connect a jumper wire from ‘output 4’ to orange wire on motor.
Step 5:
Third connect a jumper wire from ‘output 5’ to yellow wire on motor.
Step 6:
Fourth connect a jumper wire from ‘output 6’ to pink wire on motor.
Step 7:
Fifth connect a jumper wire from ‘output 7’ to blue wire on motor.
Step 8:
Sixth type this into a python file (or copy-paste):
#CONTROLLING A STEPPER MOTOR
#Author: Robert Caldwell
#Date: 14 August 2013
from time import sleep
import piface.pfio as pfio
pfio.init()
print"Type: direction(rotations, speed)"
def anticlockwise(rotations, speed):
sleep_time=0.1 / float(speed)
for loop in range(1,int(512*float(rotations))):
pfio.digital_write(4,1)
sleep(sleep_time)
pfio.digital_write(7,0)
sleep(sleep_time)
pfio.digital_write(5,1)
sleep(sleep_time)
pfio.digital_write(4,0)
sleep(sleep_time)
pfio.digital_write(6,1)
sleep(sleep_time)
pfio.digital_write(5,0)
sleep(sleep_time);
pfio.digital_write(7,1);
sleep(sleep_time)
pfio.digital_write(6,0)
sleep(sleep_time)
pfio.digital_write(7,0)
def clockwise(rotations, speed)
sleep_time=0.1 / float(speed)
for loop in range(1,int(512*float(rotations)))
pfio.digital_write(7,1)
sleep(sleep_time)
pfio.digital_write(4,0)
sleep(sleep_time)
pfio.digital_write(6,1)
sleep(sleep_time)
pfio.digital_write(7,0)
sleep(sleep_time)
pfio.digital_write(5,1)
sleep(sleep_time)
pfio.digital_write(6,0)
sleep(sleep_time)
pfio.digital_write(4,1)
sleep(sleep_time)
pfio.digital_write(5,0)
sleep(sleep_time)
pfio.digital_write(4,0)
 Step 9:
Step 9:
 Step 9:
Step 9:Done!
The motor I used was 28BYJ48 5V DC
Your motor should now obey orders you type!
(make your speed 10-600)
If you have any problems, ask me!
For more detail: Controlling a stepper motor with the Raspberry Pi and Piface