
Abstract:
Presently, self-driving cars are operational in foreign nations; however, their implementation in India remains unfeasible due to reliance on GPS and sensor-based approaches. A key issue with GPS is its tendency to display roads on maps that may not exist or may not accurately reflect the road conditions in India, which often include non-concrete surfaces. To address this challenge, our proposal involves employing a pattern matching technique for self-driving vehicles.
In our project, we propose the use of a distinct pattern deployed on the road surface. These patterns serve as a specialized guide for path detection and identification of road types, enabling the implementation of self-driving cars in India. Our prototype entails a model car equipped with a Raspberry Pi to process images captured by onboard cameras. These images are transmitted remotely to a computer for processing, after which instructions are sent back to the vehicle. Additionally, various sensors are positioned around the car to detect surrounding obstacles.
The camera is capable of capturing specific patterns on the road, which act as navigational pathways for the model car, facilitating easier navigation on Indian roads. Our prototype integrates a hybrid approach, combining existing technologies with the novel methodology of detecting special patterns marked on the road surface, thereby enhancing overall performance and reliability.
1. INTRODUCTION
A self-driving car, also referred to as an autonomous or driverless car, operates without human intervention and relies on sensors to detect its surroundings. These sensors, combined in a variety of configurations, enable the vehicle to identify pathways, obstacles, pedestrians, and other elements in its environment. The advantages of autonomous vehicles include reduced costs due to decreased fuel consumption, enhanced safety, improved mobility, and increased customer satisfaction.
Safety benefits encompass a reduction in traffic collisions and lower accident rates, resulting in fewer injuries and related costs such as insurance expenses. Automated cars have the potential to enhance traffic flow by optimizing routing between origins and destinations, providing mobility for individuals such as children, the elderly, disabled persons, and those with limited access to non-autonomous vehicles. They also offer relief from driving stress and navigation challenges, reduce the need for parking space, lower fuel consumption, decrease crime rates, and facilitate transportation services such as converting existing vehicles like taxis, buses, and trains into fully automated options for passengers.
Between manually driven vehicles (referred to as SAE Level 0) and fully autonomous vehicles (SAE Level 5), there exists a range of semi-automated vehicles. These vehicles, developed prior to full automation, represent an iterative approach to semi-automating certain aspects of driving while still requiring a human driver's oversight. Due to their reliance on preprogrammed code, semi-automated vehicles may travel more slowly as they process secondary data such as traffic lights and unexpected pedestrian encounters. They may also face challenges in detecting certain objects, such as light debris or potholes, and responding to signals from humans, such as police officers directing traffic.
However, advantages of autonomous vehicles include the potential for higher speed limits, smoother rides due to better vehicle control and greater visibility, and increased roadway capacity. By reducing the need for safety gaps between vehicles traveling at higher speeds, autonomous vehicles can minimize traffic congestion.
Currently, drivers on highways typically maintain distances of 40 to 50 meters (130 to 160 feet) from the vehicle in front of them. However, increases in highway capacity can exacerbate traffic congestion, especially in urban areas. Authorities often struggle to manage traffic flow, leading to additional congestion. Autonomous vehicles offer the potential to alleviate this congestion by combining data on traffic patterns with predictions of driver behavior, reducing the need for traffic police and signage. Additionally, autonomous vehicles have the potential to be utilized continuously, reducing the need for parking space compared to traditional vehicles, which are often parked and unused for the majority of the time.
1.1 Problem Statement
Conventional vehicles have been in use for many years, and according to online surveys, accidents predominantly occur due to human error. This is attributed to several factors:
– Humans are not adept at traveling at high speeds, leading to degraded time and distance perception as speed increases.
– Human error contributes significantly to fuel wastage.
– Traffic congestion tends to rise as a result of human error.
Traditional vehicles have been in use for many years, and according to online surveys, accidents primarily occur due to human error. This is attributed to various factors:
• Human perception and reaction abilities diminish as speed increases.
• Human error leads to significant fuel wastage.
• Traffic congestion often results from human error.
Existing systems are typically manufactured in foreign countries, presenting challenges when implementing them locally. This is due to several reasons:
• Driving practices differ between countries, with some utilizing different lane configurations than those commonly used in our country, where left-lane driving is prevalent.
• The traffic conditions in India are notably more congested compared to other developed nations, posing potential challenges for the effective operation of current systems on our roads.
2. LITERTURE
Many of the technical advancements driving self-driving cars stem from innovations in software and algorithms. Significant progress in machine learning has enhanced the ability to perceive the environment, while new tracking and planning algorithms have contributed to safer and smoother driving experiences. Additionally, the software infrastructure for simulating and analyzing large datasets in data centers has played a vital role in the development of self-driving technology. Notably, Google's self-driving car project, initiated in 2009 and later transitioned into its own business entity called Waymo under Alphabet in 2016, has been a driving force behind the rapid development of self-driving capabilities. Waymo's self-driving cars encompass a wide range of technologies that enable them to sense the vehicle surroundings, perceive and comprehend the environment, and determine safe and efficient actions. From a hardware perspective, Waymo's self-driving technology can be categorized into three main areas: sensing, computing, and embedded control. Sensors capture crucial information about the vehicle surroundings, position, and environment, which is then processed by a high-performance computer. This computer interprets the sensor data, generating trajectories for the vehicle to follow, and communicates these trajectories to embedded control systems. These control systems interact with the vehicle's actuators to control steering, braking, and throttle.
Implementing self-driving cars requires an understanding of several fundamental concepts, including computer vision, sensor fusion, deep learning, path planning, and actuators. Computer vision involves extracting information from digital images or videos, automating tasks that would traditionally require human intervention. Sensor fusion combines data from various sources to reduce uncertainty and improve information accuracy. Deep learning, a subset of machine learning, focuses on learning data representations rather than using task-specific algorithms. Path planning algorithms enable autonomous vehicles to find optimal routes between points, considering factors such as minimizing turns or braking. Actuators are responsible for moving systems.
The transportation of people and goods is essential to our modern industrialized society. Self-driving vehicles (SDVs), equipped with sensors, computational algorithms, and communication devices, offer increased safety, speed, and convenience, as well as reduced energy consumption. However, SDV technologies present challenges at both the vehicle and system levels, including impacts on urban infrastructure, limitations on driving range, equipment reliability, data privacy concerns, and ethical implications for safety.
3. SYSTEM DESIGN
The objective of the design phase is to strategize a solution for the problem outlined in the requirement document. The effectiveness and quality of the system design are crucial for subsequent phases such as testing and maintenance. The tangible outcome of this phase is the design document.
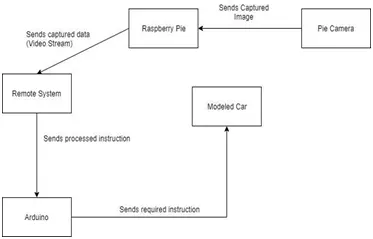
In this context, the design incorporates a Pi camera for live video streaming, depicted in Figure 1. The camera transmits the video feed to a Raspberry Pi, which processes the data and forwards it to a remote system situated elsewhere. After processing, the data is transmitted to an Arduino, which in turn relays instructions to the model car for operation under specific conditions.
Once the car is set in motion on the road, it continues moving until it either detects an obstacle ahead or reaches the end of a designated pattern. The car utilizes sensors to capture the pattern on the road and tracks that specific pattern for guidance. In instances where the desired path from the origin to the destination is obstructed, the car allows the user to select an alternative route. Moreover, when faced with a scenario where the current path diverges into two directions, the car prompts the user to choose the preferred route to proceed.
4. IMPLEMENTATION
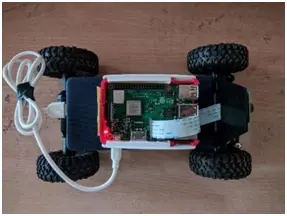
Our prototype model demonstrates the implementation of the applications discussed in this paper. The series of figures below depict the prototype Mobile Robot (Vehicle) utilized in constructing the model. Our primary emphasis was on the Following Vehicle, which is capable of detecting and evading obstacles, coordinating with its environment, obtaining routes, and adhering to them.

Another application involves monitoring the vehicles nearby and autonomously adjusting speed to navigate through traffic congestion. Initially, sensors were installed on the prototype car to enable detection of obstacles and neighboring vehicles in its vicinity.
We assembled all the necessary components for the Arduino, and subsequently linked the Arduino's output to the motor driver, which regulates the power supplied to the model car, thus controlling its speed. After integrating the sensors into the model, we connected the camera, tasked with capturing video footage to detect patterns, to the Raspberry Pi. The image processing was conducted remotely on an external system. Utilizing radio waves, we transmitted data from the Raspberry Pi to the system, processed it, and then sent back the required output to the Raspberry Pi. The system undertakes the task of identifying detected obstacles and determining the appropriate response. These obstacles may include other vehicles or pedestrians crossing the road. Additionally, the remote system is capable of dictating the speed and direction of the model car, adhering to the specific pattern or pathway designated for the model car on the road.