
GNSS location with standards like GPS is a key feature of smartphones and other devices. They enable you navigate around, and share your location with friends, family, and business contacts. However, sometimes we find it difficult to get an accurate location because of a number of factors like tall buildings in urban area bouncing the satellite network, etc. This can be really problematic for someone seeking for directions, delivery companies, e-hailing taxi riders etc. However, Google has come up with a solution on android devices via 3D mapping aided GPS corrections.
For reasons behind the project, they say:
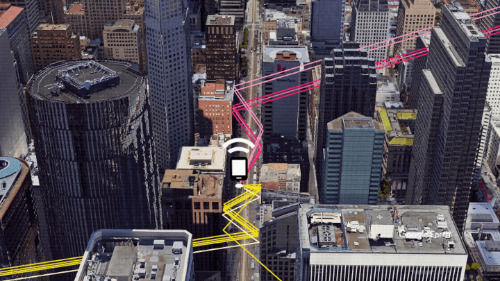
At Android, we want to make it as easy as possible for developers to create the most helpful apps for their users. That’s why we aim to provide the best location experience with our APIs like the Fused Location Provider API (FLP). However, we’ve heard from many of you that the biggest location issue is inaccuracy in dense urban areas, such as wrong-side-of-the-street and even wrong-city-block errors. This is particularly critical for the most used location apps, such as rideshare and navigation. For instance, when users request a rideshare vehicle in a city, apps cannot easily locate them because of the GPS errors. The last great unsolved GPS problem. This wrong-side-of-the-street position error is caused by reflected GPS signals in cities, and we embarked on an ambitious project to help solve this great problem in GPS.
Explaining how the 3D mapping works, Google says:
The 3D mapping aided corrections module, in Google Play services, includes tiles of 3D building models that Google has for more than 3850 cities around the world. Google Play services 3D mapping aided corrections currently supports pedestrian use-cases only. When you use your device’s GPS while walking, Android’s Activity Recognition API will recognize that you are a pedestrian, and if you are in one of the 3850+ cities, tiles with 3D models will be downloaded and cached on the phone for that city. Cache size is approximately 20MB, which is about the same size as 6 photographs. Inside the module, the 3D mapping aided corrections algorithms solve the chicken-and-egg problem, which is: if the GPS position is not in the right place, then how do you know which buildings are blocking or reflecting the signals? Having solved this problem, 3D mapping aided corrections provide a set of corrected positions to the FLP. A system API then provides this information to the GPS chip to help the chip improve the accuracy of the next GPS fix.
Read more: 3D MAPPING IMPROVES URBAN GPS ACCURACY FOR YOUR APP