
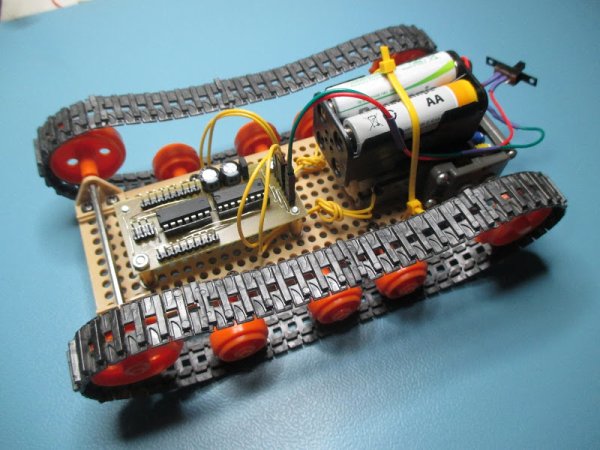
I will start from saying that the board could be replaced by any Arduino plus some(s) its motor driver shield(s). So why I made it you may ask? Well, while I made this tiny tank-robot model presented on below pictures, I wanted to make at least some things by myself, and decide what I need and how I need it instead of only buying prefabricated stuff.
This is the result, hope you will enjoy it and that maybe you will find inspirations for your own stuff.
Her's what it has and what it can..
- Handle two separate motors, each can run either “forward”, “backward”, or stop.
- Motors can be powered from a separate power source (there's a jumper for that, if removed, power is taken from a source connected to a separate goldpin)
- ATtiny24 manages the board, it's relatively small microprocessor, but I think that it will be fine for such project. All its pins are available via goldpins, I also added a couple goldpins connected to Vcc and GND to make easier connection to other boards, shields and stuff like that.
- To make programming easier, 6 PINs ISP socket for the ATtiny24 is also included.
- ATtiny24 can be removed and the motor driver can be managed from external source, e.g. an Arduino. This could be useful in future if the ATtiny24 would not be sufficient.
- There isn't any voltage regulator, or step/up/down/ converter because it would make the board less flexible.

The hardware was designed in Eagle, the board is available on GitHub.
Software
PB0, PB1, PB2 and PB3 ports of the ATtiny24 are used to drive the motor, others are available for other purposes, e.g to communicate with the sensors. There's not a lot of them left, because the microprocessor is quite small, but I think that for such project, it will be enough.
For more detail: ATtiny44 evaluation board for DYI robots