Abstract:
An online comprehensive solution is being developed for managing internet banking. Autonomous cars represent the future of smart transportation, envisioned as efficient vehicles capable of avoiding crashes, ideally suited for urban environments. The objective of the project is to create a car that can operate independently with any driver; it simply requires a command from the user to initiate movement towards the designated destination. Utilizing a Raspberry Pi processor, the project aims to construct a prototype of an autonomous car. Sensor interfacing is implemented to gather essential real-world data for the vehicle. By integrating various algorithms such as traffic light detection, obstacle detection, and speed control, the car is designed to navigate safely and intelligently, mitigating the potential for human errors. The technology utilized by autonomous cars and “connected vehicles” enables communication with roadside infrastructure, such as traffic lights and road conditions, enabling optimization of fuel consumption and emission reduction.
1. INTRODUCTION
Autonomous vehicles, also known as self-driving cars, represent a revolutionary advancement in transportation technology, capable of independently navigating routes, interpreting surroundings, making decisions, and functioning without direct human intervention. The impetus behind the development of autonomous cars stems from various factors, including the imperative for enhanced driver and road safety, population growth, expanding infrastructure, rising vehicle numbers, the necessity for efficient time management, and optimal resource utilization.
The progression and emergence of autonomous vehicles owe much to significant advancements in multiple fields, encompassing wireless communication, embedded systems, navigation, sensor and ad hoc network technologies, data acquisition and dissemination, and data analytics. The concept of autonomous vehicles traces back to the 1920s with the introduction of “phantom autos,” which were remotely controlled. Subsequent decades saw the evolution towards fully self-sufficient autonomous cars, notably with the creation of the Autonomous Land Vehicle (ALV) by researchers at Carnegie Mellon University's NavLab. Concurrently, initiatives like the “Prometheus project,” sponsored by Mercedes in 1987, marked pivotal milestones with the development of robotic cars capable of tracking lane markings and other vehicles. In the 21st century, burgeoning interest in autonomous vehicles has been propelled by the availability of cost-effective, high-performance technologies across various domains.
As global population and vehicle numbers surge, the strain on transportation infrastructure intensifies, impacting roadways, parking facilities, fuel stations (for conventional vehicles), and charging points (for electric and hybrid vehicles). Despite governmental efforts to bolster road safety through technologies like closed-circuit television (CCTV) cameras and road sensors, human error remains a significant contributor to road accidents, with fatalities exceeding 32,000 in the United States alone in 2014, and climbing to over 35,000 in 2015.
Developing countries, such as India, confront even greater transportation challenges due to diverse road conditions, a heterogeneous vehicle mix, and chaotic traffic. In such contexts, the pressing need for robust transportation infrastructure and services is underscored. Indian roads often feature speed breakers to regulate vehicle speeds and encounter issues like unpredictable potholes, posing significant risks to road safety and human life.
To mitigate human error and address life-threatening road situations, alternative technologies like connected and autonomous vehicles are being actively explored as promising solutions.
2. LITERATURE SURVEY
- Autonomous Cars: Research Results, Issues, and Future Challenges
Over the past century, the automotive industry has made significant strides in producing dependable, safe, and affordable vehicles. Recent advancements in computing and communication technologies have propelled the development of autonomous cars, bringing them closer to reality. Prototype models of autonomous cars have already logged millions of miles in test drives, with leading technical companies and automakers investing substantial resources in advancing this technology for full commercialization in the near future. However, despite this progress, several technical and non-technical challenges persist. Technical hurdles include managing software complexity, implementing real-time data analytics, and ensuring thorough testing and verification processes. Meanwhile, non-technical issues such as consumer acceptance, insurance regulations, and ethical considerations pose significant concerns. To facilitate the widespread adoption of cost-effective, safe, and efficient autonomous cars, it is imperative for designers, implementers, policymakers, regulatory bodies, and car manufacturers to address these challenges collectively and implement effective solutions.
An Autonomous Driving System for Unknown Environments Using a Unified Map
Significant progress has been made in the development of autonomous vehicles, which are poised to become integral components of future intelligent transportation networks. To ensure their effective integration onto real roads, these vehicles must autonomously navigate collision-free routes while adhering to traffic regulations. Unlike many existing methodologies reliant on pre-established road maps and traffic signals, our proposal advocates for algorithms and systems utilizing a comprehensive map generated through diverse onboard sensors to identify obstacles, vehicles, traffic signals, and pedestrians. This unified map not only incorporates real-time data on nearby obstacles but also virtual representations of traffic signs and pedestrians. By leveraging this map, the path planning system can efficiently determine collision-free routes that comply with traffic laws. Our proposed algorithms have been successfully implemented on a commercial vehicle and rigorously validated across various environments, including participation in the 2012 Hyundai Autonomous Ground Vehicle Competition.
Short Term Traffic Prediction for Edge Computing Enhanced Autonomous and Connected Cars
Autonomous and connected cars (ACCs), along with edge computing (EC), have emerged as a promising solution for realizing environmentally friendly intelligent transportation systems in smart cities. This study aims to tackle short-term traffic prediction, a critical element for the success of ACC applications, within the framework of the European Telecommunications Standards Institute's multi-access EC (MEC) architecture, which presents distinct constraints compared to traditional cloud computing. Initially, a data-centric experimental platform is devised and implemented to facilitate the development of traffic prediction algorithms. Additionally, this paper introduces an innovative short-term traffic prediction model that incorporates both a traffic light model and a vehicle velocity model, taking into account the limited computing resources of MEC servers. It is worth noting that the impact of traffic lights is intricate and has not been thoroughly investigated in most related studies. This research addresses this gap by modeling the queueing time when a driver encounters a red light at a road intersection. Furthermore, for vehicle velocity forecasting, a novel low-complexity semiparametric prediction model is proposed, which considers periodic features and spatial/temporal correlations of dynamic road events. The experimental findings demonstrate that our vehicle-velocity prediction model achieves nearly equivalent accuracy to the well-established Long Short-Term Memory Neural Network model, while demanding significantly lower computational complexity. [3]
Road profile recognition for autonomous car navigation and Navstar GPS support- W.
Autonomous vehicle navigation relies on the integration of dead reckoning (DR) with road profile recognition (RPR). This navigation system relies on sensors, commonly found in modern cars for various functions such as ABS, to detect changes in altitude and driving direction. The configuration of the navigation system is detailed, and simulations are conducted over driving distances of approximately 150 km using realistic road data and typical sensor accuracies. The results show positioning errors of less than 10 m (standard deviation). To achieve this level of accuracy, continuous estimation of synchronization errors between measured and mapped data is necessary. This innovative navigation approach complements existing commercial car navigation systems that utilize Navstar GPS technology.
RFID-based autonomous mobile car
The Radio Frequency Identification (RFID) system is regarded as one of the pivotal technologies of the 20th century, holding significant importance. Among the various applications of RFID, industrial automation stands out as a critical focus area for its development. Hence, this study presents the design and implementation of an RFID-based autonomous mobile car, aimed at broadening the scope of RFID systems' applications. The Microchip PIC18F4550 microcontroller is utilized to oversee the operation of the autonomous mobile car and facilitate communication with the RFID reader [5]. By pre-programming movement commands such as turning right, turning left, speeding up, and slowing down onto RFID tags and affixing these tags onto designated tracks, the autonomous mobile car can interpret and execute the corresponding commands. Leveraging the convenience and contactless nature of RFID systems, the proposed mobile car exhibits immense potential for diverse applications including industrial automation, goods transportation, data transmission, and unmanned medical care, among others, in the foreseeable future.
Autonomous parallel parking of a car-like mobile robot by a neuro-fuzzy behavior- based controller
Utilizing sensor-driven behavior, a neuro-fuzzy control system is devised for a car-like mobile robot, focusing on addressing the challenge of parallel parking within a constrained rectangular space with a single backward maneuver. The autonomous fuzzy behavior control is achieved by training the car-like mobile robot to park in two parking dimensions, leveraging training data derived from sensor readings obtained offline. A fifth-order polynomial serves as the reference trajectory for training purposes. The proposed controller adopts an Adaptive Neuro-Fuzzy Inference System (ANFIS) architecture to determine the turning angle as its output. Given that the robot's states, including positions and orientations, are measurable at each discrete-time step during the control process, this controller enables the robot to follow feasible trajectories based solely on the initial configuration information, ultimately achieving successful parking at the predetermined goal position. Simulation results, based on real car dimensions, substantiate the practicality and efficacy of the proposed controller in executing car maneuvers effectively.
Design of multifunctional autonomous car using ultrasonic and infrared sensors
The escalating challenges encountered by commuters in their daily journeys on roads have become increasingly problematic. Issues such as lateness and accidents are all too common. The autonomous car model proposed in this research paper seeks to address these concerns by eliminating the need for human drivers. By removing humans from behind the wheel, the car aims to mitigate the risks associated with accidents, tardiness, and traffic congestion. Equipped with the ability to navigate tracks, overtake vehicles, detect obstacles, negotiate sharp bends and turns, adhere to traffic signals, and illuminate its surroundings in low-light conditions, this car represents a comprehensive solution to road-related issues. The paper provides detailed circuit diagrams outlining the functionality of these features, along with a mechanical model of the car that has been successfully implemented and tested by the authors.
3. METHODOLOGY
The fundamental components of self-driving cars, including car navigation systems, path planning, environment perception, and vehicle control, are examined and evaluated. These autonomous vehicles incorporate a diverse range of technologies such as automatic control systems, architectural design, artificial intelligence algorithms, computer vision capabilities, and more. The development of self-driving cars represents the culmination of advancements in computer science, pattern recognition, and intelligent control technologies.
Car Navigation System When operating in self-driving mode, two crucial challenges arise: determining the vehicle's present location and charting the optimal route to the intended destination. While human drivers typically address these issues through their own familiarity with driving routes, autonomous vehicles must autonomously and adeptly ascertain their whereabouts and plot the most efficient course to reach their destination. To achieve this goal, self-driving cars are equipped with an onboard navigation system tailored specifically for autonomous operation..
Location system The primary function of the location system is to ascertain the precise whereabouts of the vehicle, typically categorized into relative, absolute, and hybrid location methods. Relative location involves determining the current position of the self-driving car by factoring in the distance traveled and direction from its previous position.
Electronic map (em) Electromagnetic (EM) technology serves as a repository for storing digital map data, encompassing a wide array of information such as geographical features, traffic conditions, building layouts, road infrastructure, and signage details. Anticipated advancements in EM technology specifically tailored for autonomous driving are envisioned to include functionalities such as automatic road sign recognition and the seamless exchange of driving data among self-driving vehicles.
Global Path Planning It is utilized to identify the most efficient route from the initial point to the destination. Typically, conventional path planning algorithms like Dijkstra's algorithm, Bellman-Ford algorithm, Floyd's algorithm, and heuristic algorithms (Seshan and Maitra, 2014) are applied to integrate electromagnetic (EM) data and compute the optimal path.
4. BLOCK DIAGRAM
WORKING PRINCIPLE
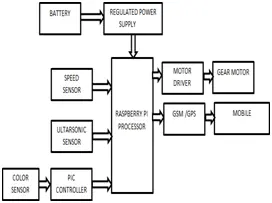
The block diagram illustrating the setup for Autonomous Cars is depicted in Figure 4. The proposed system serves as a prototype for an autonomous vehicle, designed to fulfill multiple objectives such as detecting potholes, identifying traffic lights, and regulating speed within school zones. To achieve these functionalities, Raspberry Pi processors and various sensors are employed within the system. The vehicle configuration incorporates a robot arrangement with Gear motors. An Ultrasonic sensor is utilized to detect bumps and potholes, while a Color sensor is employed to recognize traffic signals. For instance, upon detecting a red light, the vehicle halts its motion. Additionally, a speed sensor monitors the vehicle's velocity in real-time, enabling control over handling and braking mechanisms. This sensor operates through a signal generator that produces electrical pulses, which are then transmitted to the vehicle's onboard computer. Zigbee communication facilitates the identification of school zones, prompting the vehicle to reduce its speed accordingly. Moreover, GSM technology enables the transmission of messages via mobile phones to designated recipients for further action.
Raspberry Pi Proccessor:
The Raspberry Pi, a compact single-board computer, is about the size of a credit card. Presently, there are five models available on the market: the Model B+, Model A+, Model B, Model A, and the Compute Module, which is exclusively sold as part of the Compute Module development kit. While all models utilize the same System on Chip (SoC) known as the BCM2835, they vary in other hardware features. The Model A and B share the same printed circuit board (PCB), whereas the B+ and A+ boast a new design that closely resembles each other in form factor. In contrast, the Compute Module adopts an entirely distinct form factor and cannot operate independently.
This project endeavors to construct a prototype of an autonomous car with monocular vision, employing the Raspberry Pi as its processing unit. Specifically, the project utilizes the Model B Rev 2, equipped with 512 MB of RAM, two USB ports, and a 10/100 Ethernet controller. Powered via USB, the Raspberry Pi facilitates video output to various devices such as traditional RCA TV sets, modern monitors, or TVs through its HDMI port. This functionality grants the user the fundamental capabilities of a standard computer. Notably, the Raspberry Pi boasts remarkably low power consumption, typically around 3 watts.
PIC microcontrollers
Manufactured by Microchip Technology in Chandler, Arizona, PIC microcontrollers comprise a family of specialized microcontroller chips. Though originally derived from “peripheral interface controller,” the term PIC is seldom used today. Typically, a microcontroller integrates a processor, memory, and peripherals. PIC microcontrollers stand out as some of the smallest microcontrollers globally, capable of executing a vast array of tasks. These microcontrollers are integral components in various electronic devices, including phones, computer control systems, alarm systems, and embedded systems. While diverse types of microcontrollers exist, the GENIE series of programmable microcontrollers are esteemed as among the finest. Programmed and simulated using circuit-wizard software, these microcontrollers offer versatility and efficiency. Each PIC microcontroller architecture features registers and a stack, with registers serving as Random Access Memory (RAM) and the stack storing return addresses.
ULTRASONIC SENSORS
Ultrasonic sensors, also referred to as transceivers when performing both sending and receiving functions, or more commonly known as transducers, assess properties of a target by analyzing the reflections of radio or sound waves, respectively. In this project, these sensors are employed to gauge the distance of obstacles from the vehicle. They have been implemented in vehicles to assist drivers in various driving tasks, such as parking.
SPEED SENSORS
Initially, the wheel speed sensor was introduced as a replacement for the mechanical linkage connecting the road wheels to the speedometer. This innovation aimed to eliminate issues such as cable breakage and streamline gauge construction by removing all moving parts except for the needle/spring assembly. As automated driving aids like electronic ABS became more prevalent, the sensor gained additional significance by providing wheel speed data to controllers, aiding operators in vehicle control. Furthermore, the vehicle speed sensor plays a crucial role in facilitating proper gear shifting for vehicle maintenance purposes.
COLOR SENSOR
Color represents a valuable attribute in autonomous vehicle systems employing machine vision, aiding in tasks like obstacle detection, lane/road tracking, and identifying various objects within a scene. Regrettably, the utilization of color in current autonomous vehicle systems remains limited, primarily due to the complexity of color-based recognition in outdoor environments. Additionally, existing color machine vision techniques have yet to demonstrate effectiveness in accurately interpreting real-world outdoor images.
GEAR MOTOR
In this setup, the DC geared motor serves to regulate the robot's motion and facilitate its transport to the intended location. The gear assembly plays a crucial role in amplifying torque while diminishing shaft speed. Operating under a 24.0 volt, 250mA current, the motor achieves a speed of 150rpm under no load conditions.
MOTOR DRIVER
Motor drivers serve as a vital intermediary component linking motors and control circuits. Given that motors demand a substantial current, while controller circuits operate on low-current signals, the role of motor drivers is to transform a low-current control signal into a higher-current signal capable of driving a motor.
GSM/GPS
GSM (Global System for Mobile communication) serves as a prevalent digital mobile network utilized by mobile phone users worldwide. Conversely, GPS (Global Positioning System) functions as a space-based satellite navigation system, furnishing precise location and time data across all weather conditions and geographical regions. GPS receivers find widespread application in navigation, positioning, time synchronization, and various research endeavors.
To operate, a GSM modem necessitates a SIM card and operates within the network coverage provided by the subscribed network operator. It offers connectivity to computers via serial, USB, or Bluetooth interfaces. Additionally, a GSM modem can take the form of a standard GSM mobile phone, equipped with the requisite cable and software driver to establish connections with a computer's serial or USB port. Generally, GSM modems are preferred over mobile phones for such purposes.
POWER SUPPLY
A power supply is an essential electrical apparatus responsible for delivering electric power to an electrical load. Its principal role involves converting electric current from a source into the appropriate voltage, current, and frequency required to operate the load effectively. Consequently, power supplies are often termed electric power converters. They can exist as standalone units or integrated components within the appliances they power, such as those commonly found in desktop computers and consumer electronics devices.
In addition to voltage conversion, power supplies may fulfill various other functions, including regulating the current drawn by the load to safe levels, automatically disconnecting power during electrical faults, conditioning the power to mitigate electronic noise or voltage spikes, implementing power-factor correction, and storing energy to sustain the load during temporary power interruptions.
Battery
A battery is employed to provide the necessary power supply for operating the various components within the robot. In this instance, a 12-volt rechargeable dry cell battery has been utilized for this purpose. Specifically, a Lithium-Polymer (Li-Po) Battery, 3 Cell (3S) with a capacity of 11.1 volts and 2200mAh, has been selected. This battery is notable for its compact size and lightweight construction. It features an XT60 connector plug and boasts a discharge current of 55 amps, calculated by multiplying 25 (the discharge rate) by 2200mAh.
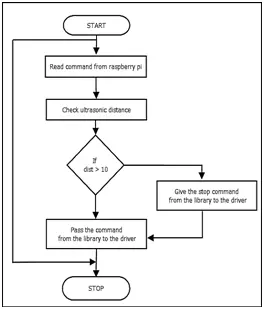
5. FLOWCHART