
Preface: This project is inspired by the pan-tilt camera platform. Some components of the project is from an open-source project on this website http://spin.media.mit.edu/build
The reason that I started this project is I found it is necessary to build a platform that can rotate freely controlled by Raspberry Pi. Once the platform is designed, many applications can be used on the certain platform. For example, the platform can be loaded with sensors, cameras, and etc. By rotating the platform itself, the system is capable of detecting the environment dynamically. Another good application that can be developed is 3D reconstruction of small objects by a single camera. Detail will be discussed later.

This is the top view of the upper level. The control unit, sensor, and switches are mounted there. The main controller of this first version is a Raspberry pi 2. On the bread board, a GPS module through serial port and a Adafruit 10-DOF module through I2C is used as the sensor. A camera module can be added if necessary.
The system is also wireless enabled, with a WIFI dongle, the user is able to remotely access the system using SSH.
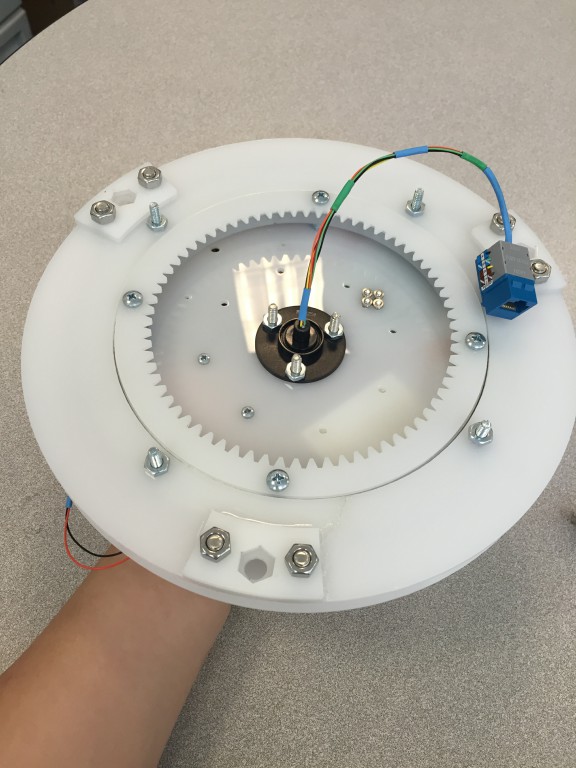
This is the bottom view of the upper level. A 6 line Slip Ring is used to connect the electronic signals and power lines between upper level and lower level. To make connection easier, a Ethernet connector is used here. Among 6 lines of the slip ring, only 4 lines are used, they are 12V, 5V, GND, SERVO_CONTROL, which means that two lines are available for the future design.
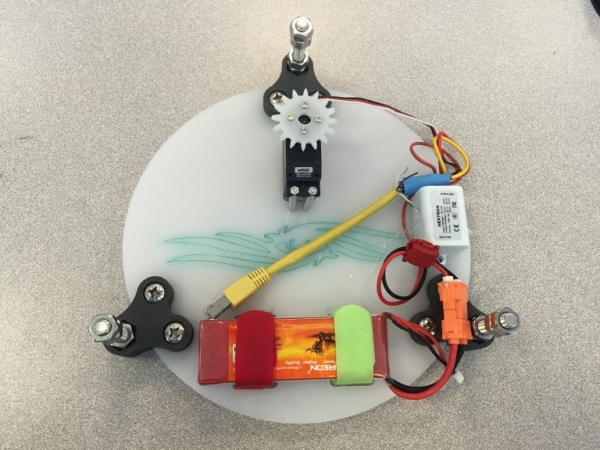
This is the lower level of the design. Those three grey standoffs are the design of the SPIN porject. A 3000 mAh, 11.1 V lithium battery is used as the power supply of the whole system. A DC/DC converter is used to step down the 11.1 V voltage to 5 V to power the Raspberry pi. 11.1 V will be used directly to power the servo to make sure the servo will operate in its best status.
Compass application