
NOTE: THIS INSTRUCTABLE IS BEING WRITTEN
This project is a quadcopter powered by a Multiwii and controlled with a Raspberry Pi 2 B. This quadcopter has a particularity because he's using 2 differents controller and he could be pilot with 2 differents devices : a remote control or a smartphone.
The Multiwii controller look after the 4 motors and distribute the power to supply them whereas the Raspberry Pi collect the informations who came from the smartphone and relay them to the Multiwii. You can also take pictures and Full HD video too !!! A Pi camera is places on the frontground of the Drone Pi. It ca recording or just take a picture to a USB key.
The frame of this quadcopter is constituating with different recycled elements and it was another challenge : create a quadcopter with sometimes heavy elements… But we did it !
We are some young french students and it was our first creation. We were helping during this project with some internet website whose Instructables and now we want to share with you our Drone Pi. Enjoy !
Step 1: Parts
To build our quadcopter you will need the following parts :
- A frame – You can buy it on the internet or you can make it like us. It's not difficult to create your frame, you just have to make a X of approximately 0,45m of diameter (for a stable quadcopter) and you put different levels on the center to put your Raspberry, Multiwii, battery, ESCs, etc…
- 4 motors (16€) – For a quadcopter you need 4 motors but if you want to make a octocopter you will need 8 motors as well. We are using Turnigy brushless motors. (we will come back to the motors in the step 2) http://goo.gl/G9oE1c
- 4 ESCs(10€) – The electronic speed controller is using to delivery the power to the motor with the informations of the Multiwii. We're using Hobbyking 30A ESC. http://goo.gl/2txm0b
- Battery (27,5€) – Of course if you want to fly you must to supply your motors so you need a Battery. We're using a Turnigy 3S 3300mAh. http://goo.gl/4GHr01
- Battery monitor(4€) – It ring when your battery is down. We're using a Hobbyking battery monitor 3S.
- Power distribution board (4€) – This board is using to connect your ESCs to the Battery.We're using a Hobbyking quadcopter power distribution board for quadcopter. http://goo.gl/0WCvB3
- Connectors 3.5mm(4,5€) – To weld the esc and the motors. http://goo.gl/byW6rg
- Connectors 4.5mm (4,33€) – To remove the old distribution board connector and weld this new. http://goo.gl/KSahYJ
- Propellers(5€) – A quadcopter with some motors but whithout propellers it isn't a quadcopter so choose your props according with your frame. For our frame of 40cm you need some props with lenght=10 and pitch=4,5. We're using 10×4,5 SF props. http://goo.gl/4taM8k
- Multiwii (49€) – This controller is using to command the motors and share the power. We're using a CRIUS AIO PRO Multiwii.
- Mounting pad(2€) – Because the motors create a lot of vibration you have to buy some mounting pad to reduce them under the multiwii. http://goo.gl/aifflj
- Raspberry pi 2 B(35€) – It could also run with another model of Raspberry pi but we have just tested with this Raspi and it's more powerful than the previous version.
- Pi camera(19€) – To capture video and take photo. It can be only run with a Raspberry pi
- Wifi key(9€) – It connect to the Raspi and create a wifi network to relay the informations from the smartphone app to the Raspi.
- USB key – To save the video
- Remote control + rc receiver – If you want to control your drone with this. You will connect the rc receiver to the Multiwii.
You have to weld the connectors to the ESC wire, to the motors wire and to the distribution board wire.
Step 2: How it works ?
The multiwii
Multiwii is a open source french project who was based on a arduino. The project is open source so we can find many kind of multiwii. We use a similare version of CRIUS AIO PRO V2. This is a flight controller: Its role is to send speed signals to the esc to hold the quadcopter in the air. We use the mutlwii project beacause its a known project used by many users with a great community but mostly because programs like this is too complicated for us.
The Raspberry
In our project the raspberry made the main role. First at the startup it create a private wifi network with a DHCP server (to give IP address), this wifi network has no internet access and this only to communicate with the smartphone. Secondly it stat a python program (created by us) who start a websocket. A websocket is a permanent connexion between the server (raspberry) and the client (the smartphone app), it will serv to received command from the app. Then the same progam connects to the multiwii via USB. It will serve to send commands informations who come from the smartphone to the multiwii ( see schema for understand). Sources are available on github (https://github.com/reglisse44/Multiwii-raspberry-drone-server)
The Application
The application is made in html/css/javascript with cordova. Cordova is a technology who permit to create an application with web technology compatible with android, ios and more … The user think it is a standard android app but in fact this is a web view :), it's easy to develop applications like this for web devellopers … Sources are availlable in github (https://github.com/reglisse44/quadcopterControl)
Step 3: The frame
To make a good frame you need to use the lightest elements as you can. For our Drone Pi, we had to build it with recycling elements so our frame is a bit heavy but anyway it doesn't matter for our motors.
The diameter of the frame is 0,45m because we wanted a “stable quadcopter” for the camera and not a “racing quadcopter”. On the center of the X they are 3 levels (maybe 4 in the futur) to put the controllers, the ESCs and our battery (you have all quotations in the pictures on the top of the page).
We've created a platform to the multiwii on the top of the quadcopter(picture 2) and another to the battery(picture 7 and 8) on the underneath of the quadcopter. For the Multiwii's platform, we wanted to put the raspberry under the multiwii because there are some connections between them. For the battery's platform, we wanted to take on or take off the battery to charge it. All picture are in next step…
Finally, we put 4 feet to the quadcopter to be able to land it but they are not pretty and bad.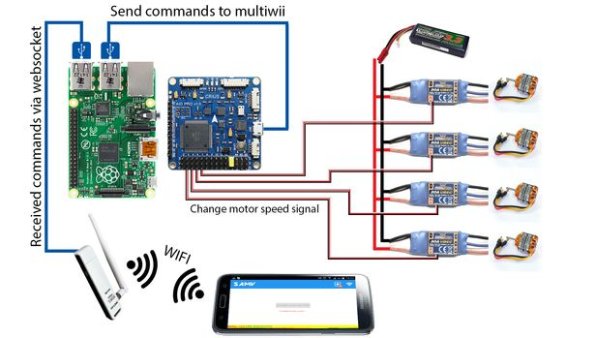
Step 4: Propulsion
For the propulsion you need your 4 motors, your 4 ESCs (to adapt the voltage to the motors), your battery and finally your Multiwii.
- Connect your motors to your ESCs. You can invert the wire to invert the rotation of your propellers (see schema to know rotation direction).To begin, DON'T put your props on the motors to don't have any accident, the props are fragile and they could be break.
- Connect the ESC to the distribution board (respect the color).
- If all is ok you can install the components on the frame
- The screw we had with the motor was too large for the propellers so we needed to enlarge them (see pictures)
For more detail: The Drone Pi