
An open source kit to build a walking smart robot dinosaur.

Now open source on GitHub: https://github.com/JacquinBuchanan/Intellisaurus
WHAT CAN I DO WITH INTELLISAURUS?
Intellisaurus is intended for many skill levels. The easy to follow instructions allow someone with a modest skill level to assemble the robot and have it walking in a matter of hours. There is no soldering or programming required to build and play with it. With a little more in-depth involvement you can connect the AI hardware and enable Google Assistant or Alexa. Impress your friends with a smart speaker that also walks. If you consider yourself a true maker or hacker then get into the source code and modify it. Or, customize the shell in your favorite 3D modeling software and print new parts. You decide!
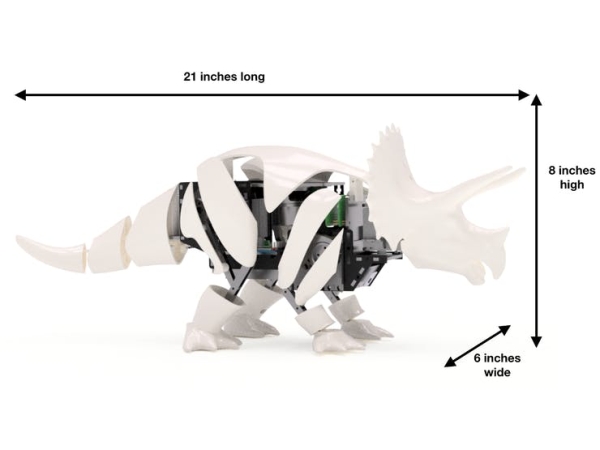
This fun loving guy reaches 8 inches tall. He sports an Arduino Nano to control the motors and a Raspberry Pi Zero W to connect to the internet and run Google Assistant, or other various AI algorithms. He walks he talks he struts his stuff! Its all within the reach of your imagination! This versatile frame can wear different shells such as Triceratops, Stegosaurus, or Dragon, each sold, or created on your 3D printer, separately. All open source software, so you are in control, modify, and improve your Intellisaurus to satisfy your Inner Maker.
Base Kit
The base kit includes all you need to build the robot. All the electronics, sensors, servos, screws and other items are included (except the two 18650 batteries). All the plastic parts with necessary screws and bolts. The only tools you need is one small Philips screw driver.
This kit includes an IR remote controller, to allow you to control the robots movements directly, without any of the Artificial Intelligence features